 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNav-Sim: A Visually Realistic Underwater Robotics Simulator and Synthetic Data-generation Framework
Oct 18, 2023



Underwater robotic surveys can be costly due to the complex working environment and the need for various sensor modalities. While underwater simulators are essential, many existing simulators lack sufficient rendering quality, restricting their ability to transfer algorithms from simulation to real-world applications. To address this limitation, we introduce UNav-Sim, which, to the best of our knowledge, is the first simulator to incorporate the efficient, high-detail rendering of Unreal Engine 5 (UE5). UNav-Sim is open-source and includes an autonomous vision-based navigation stack. By supporting standard robotics tools like ROS, UNav-Sim enables researchers to develop and test algorithms for underwater environments efficiently.
Event-based Navigation for Autonomous Drone Racing with Sparse Gated Recurrent Network
Apr 05, 2022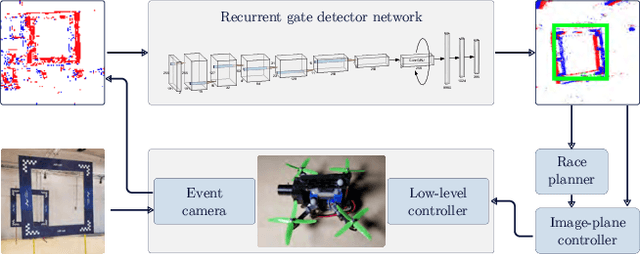

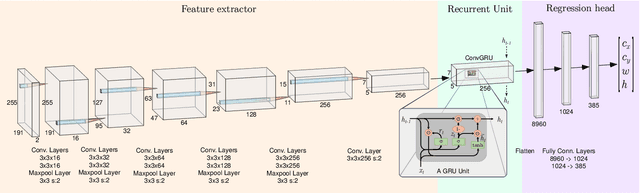
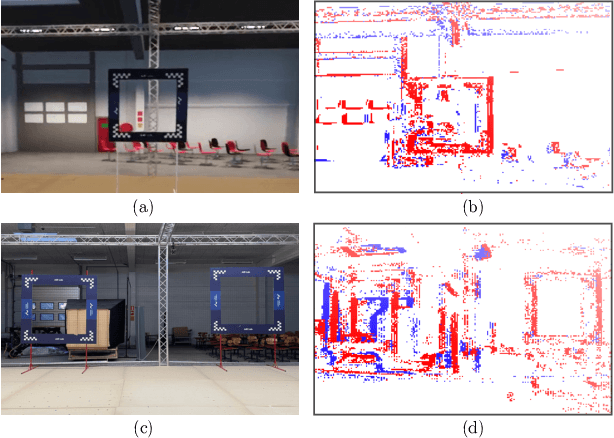
Event-based vision has already revolutionized the perception task for robots by promising faster response, lower energy consumption, and lower bandwidth without introducing motion blur. In this work, a novel deep learning method based on gated recurrent units utilizing sparse convolutions for detecting gates in a race track is proposed using event-based vision for the autonomous drone racing problem. We demonstrate the efficiency and efficacy of the perception pipeline on a real robot platform that can safely navigate a typical autonomous drone racing track in real-time. Throughout the experiments, we show that the event-based vision with the proposed gated recurrent unit and pretrained models on simulated event data significantly improve the gate detection precision. Furthermore, an event-based drone racing dataset consisting of both simulated and real data sequences is publicly released.