 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling of Underwater Vehicles using Physics-Informed Neural Networks with Control
Apr 28, 2025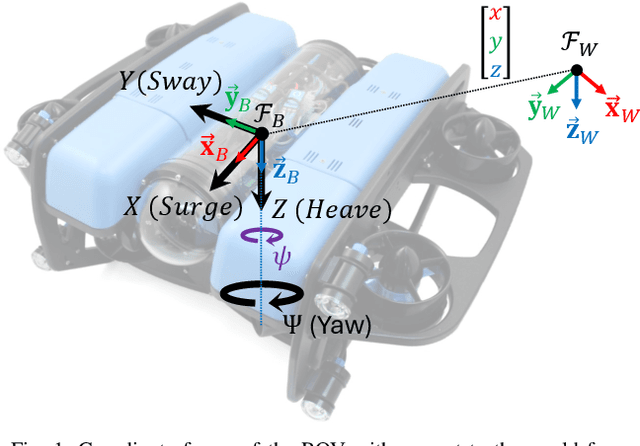
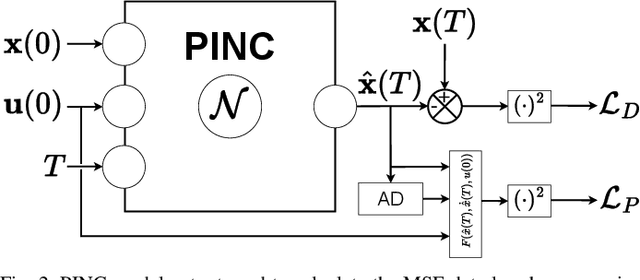
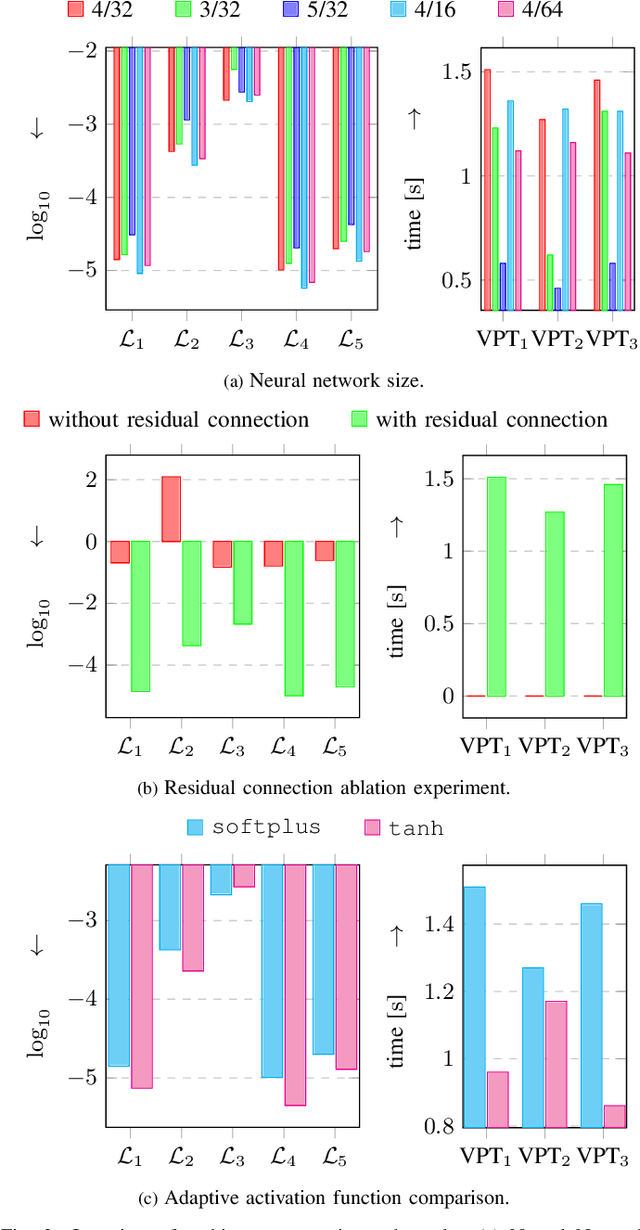
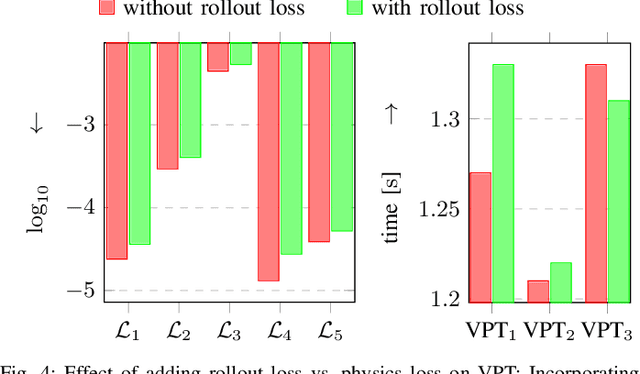
Physics-informed neural networks (PINNs) integrate physical laws with data-driven models to improve generalization and sample efficiency. This work introduces an open-source implementation of the Physics-Informed Neural Network with Control (PINC) framework, designed to model the dynamics of an underwater vehicle. Using initial states, control actions, and time inputs, PINC extends PINNs to enable physically consistent transitions beyond the training domain. Various PINC configurations are tested, including differing loss functions, gradient-weighting schemes, and hyperparameters. Validation on a simulated underwater vehicle demonstrates more accurate long-horizon predictions compared to a non-physics-informed baseline
Visual Tracking Nonlinear Model Predictive Control Method for Autonomous Wind Turbine Inspection
Oct 21, 2023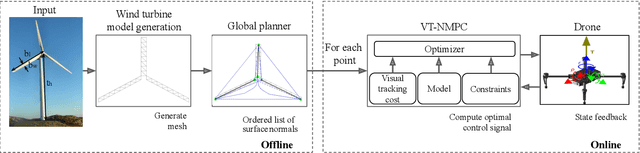
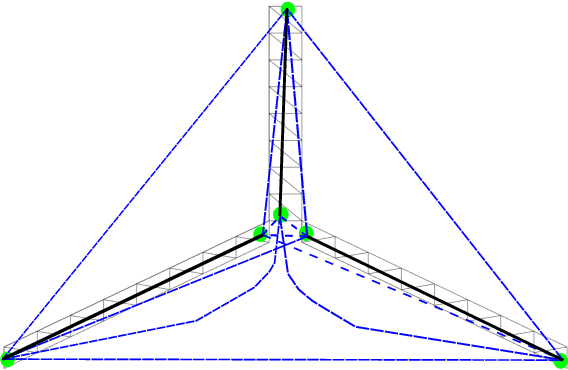
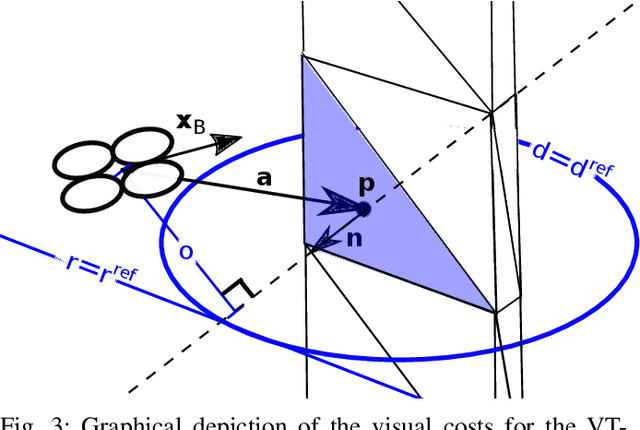
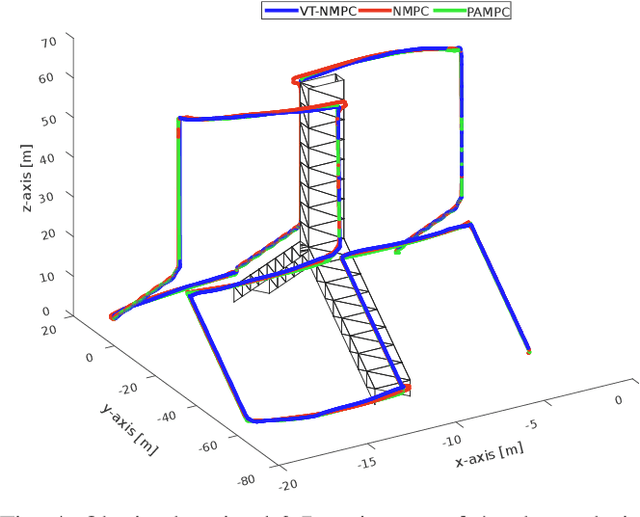
Automated visual inspection of on-and offshore wind turbines using aerial robots provides several benefits, namely, a safe working environment by circumventing the need for workers to be suspended high above the ground, reduced inspection time, preventive maintenance, and access to hard-to-reach areas. A novel nonlinear model predictive control (NMPC) framework alongside a global wind turbine path planner is proposed to achieve distance-optimal coverage for wind turbine inspection. Unlike traditional MPC formulations, visual tracking NMPC (VT-NMPC) is designed to track an inspection surface, instead of a position and heading trajectory, thereby circumventing the need to provide an accurate predefined trajectory for the drone. An additional capability of the proposed VT-NMPC method is that by incorporating inspection requirements as visual tracking costs to minimize, it naturally achieves the inspection task successfully while respecting the physical constraints of the drone. Multiple simulation runs and real-world tests demonstrate the efficiency and efficacy of the proposed automated inspection framework, which outperforms the traditional MPC designs, by providing full coverage of the target wind turbine blades as well as its robustness to changing wind conditions. The implementation codes are open-sourced.
UNav-Sim: A Visually Realistic Underwater Robotics Simulator and Synthetic Data-generation Framework
Oct 18, 2023



Underwater robotic surveys can be costly due to the complex working environment and the need for various sensor modalities. While underwater simulators are essential, many existing simulators lack sufficient rendering quality, restricting their ability to transfer algorithms from simulation to real-world applications. To address this limitation, we introduce UNav-Sim, which, to the best of our knowledge, is the first simulator to incorporate the efficient, high-detail rendering of Unreal Engine 5 (UE5). UNav-Sim is open-source and includes an autonomous vision-based navigation stack. By supporting standard robotics tools like ROS, UNav-Sim enables researchers to develop and test algorithms for underwater environments efficiently.