Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Advantages of Multiple Stereo Vision Camera Designs for Autonomous Drone Navigation
Paper and Code
May 26, 2021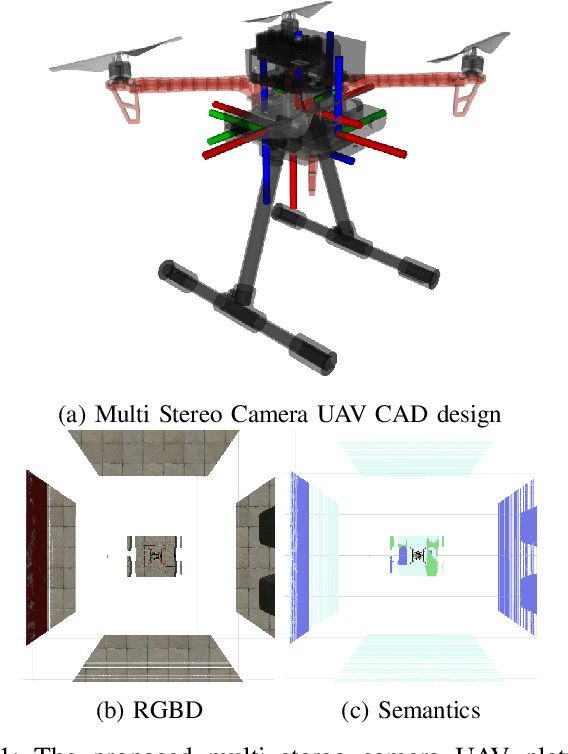
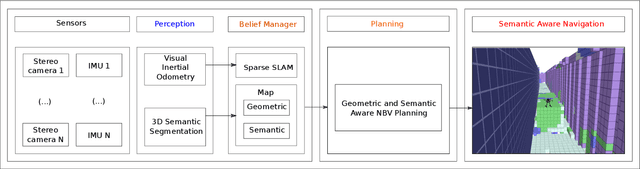
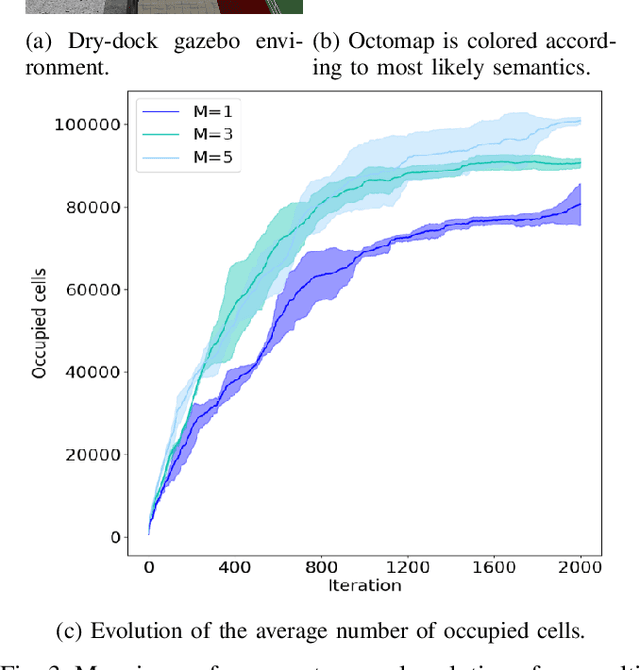
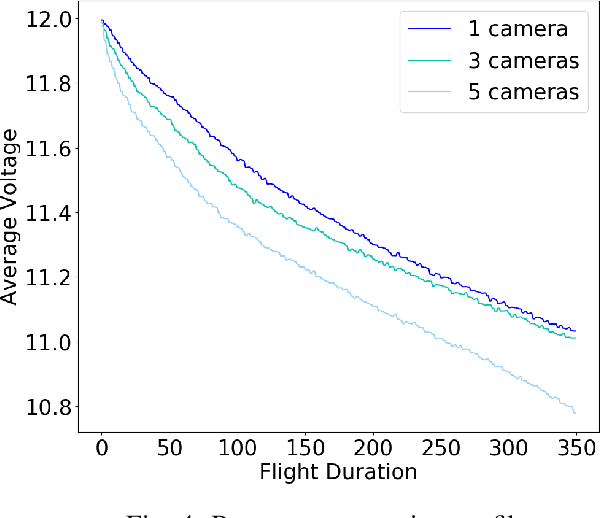
In this work we showcase the design and assessment of the performance of a multi-camera UAV, when coupled with state-of-the-art planning and mapping algorithms for autonomous navigation. The system leverages state-of-the-art receding horizon exploration techniques for Next-Best-View (NBV) planning with 3D and semantic information, provided by a reconfigurable multi stereo camera system. We employ our approaches in an autonomous drone-based inspection task and evaluate them in an autonomous exploration and mapping scenario. We discuss the advantages and limitations of using multi stereo camera flying systems, and the trade-off between number of cameras and mapping performance.
View paper on