 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Act: Trading Off Doppler Odometry and Map Registration for Efficient Lidar Localization
Mar 03, 2025Most autonomous vehicles rely on accurate and efficient localization, which is achieved by comparing live sensor data to a preexisting map, to navigate their environment. Balancing the accuracy of localization with computational efficiency remains a significant challenge, as high-accuracy methods often come with higher computational costs. In this paper, we present two ways of improving lidar localization efficiency and study their impact on performance. First, we integrate a lightweight Doppler-based odometry method into a topometric localization pipeline and compare its performance against an iterative closest point (ICP)-based method. We highlight the trade-offs between these approaches: the Doppler estimator offers faster, lightweight updates, while ICP provides higher accuracy at the cost of increased computational load. Second, by controlling the frequency of localization updates and leveraging odometry estimates between them, we demonstrate that accurate localization can be maintained while optimizing for computational efficiency using either odometry method. Our experimental results show that localizing every 10 lidar frames strikes a favourable balance, achieving a localization accuracy below 0.05 meters in translation and below 0.1 degrees in orientation while reducing computational effort by over 30% in an ICP-based pipeline. We quantify the trade-off of accuracy to computational effort using over 100 kilometers of real-world driving data in different on-road environments.
Boreas: A Multi-Season Autonomous Driving Dataset
Mar 18, 2022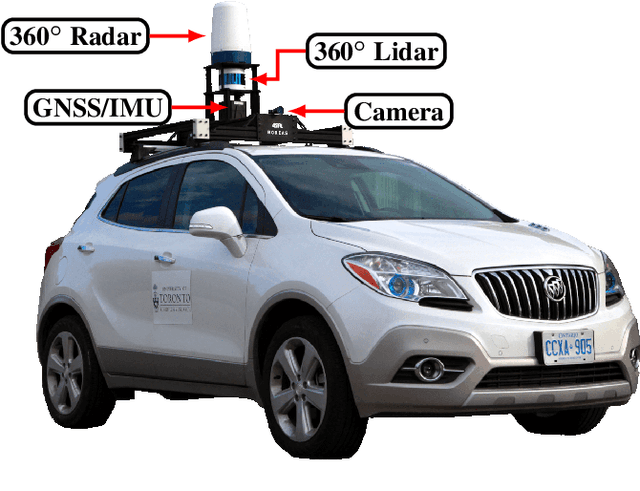
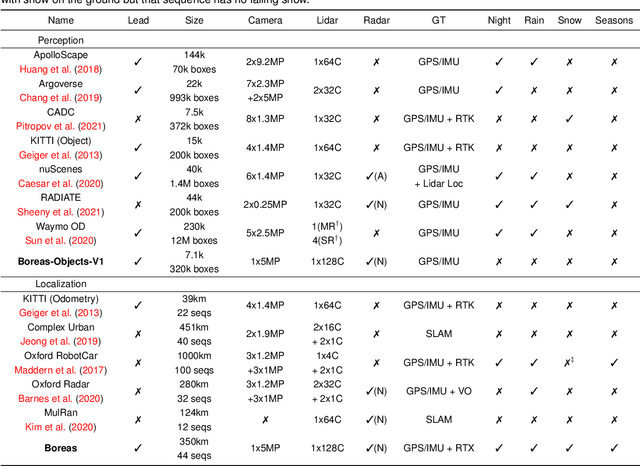


The Boreas dataset was collected by driving a repeated route over the course of one year, resulting in stark seasonal variations and adverse weather conditions such as rain and falling snow. In total, the Boreas dataset contains over 350km of driving data featuring a 128-channel Velodyne Alpha-Prime lidar, a 360 degree Navtech CIR304-H scanning radar, a 5MP FLIR Blackfly S camera, and centimetre-accurate post-processed ground truth poses. At launch, our dataset will support live leaderboards for odometry, metric localization, and 3D object detection. The dataset and development kit are available at: https://www.boreas.utias.utoronto.ca