 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sliding-Window Filter for Online Continuous-Time Continuum Robot State Estimation
Oct 30, 2025Stochastic state estimation methods for continuum robots (CRs) often struggle to balance accuracy and computational efficiency. While several recent works have explored sliding-window formulations for CRs, these methods are limited to simplified, discrete-time approximations and do not provide stochastic representations. In contrast, current stochastic filter methods must run at the speed of measurements, limiting their full potential. Recent works in continuous-time estimation techniques for CRs show a principled approach to addressing this runtime constraint, but are currently restricted to offline operation. In this work, we present a sliding-window filter (SWF) for continuous-time state estimation of CRs that improves upon the accuracy of a filter approach while enabling continuous-time methods to operate online, all while running at faster-than-real-time speeds. This represents the first stochastic SWF specifically designed for CRs, providing a promising direction for future research in this area.
A Stochastic Framework for Continuous-Time State Estimation of Continuum Robots
Oct 01, 2025State estimation techniques for continuum robots (CRs) typically involve using computationally complex dynamic models, simplistic shape approximations, or are limited to quasi-static methods. These limitations can be sensitive to unmodelled disturbances acting on the robot. Inspired by a factor-graph optimization paradigm, this work introduces a continuous-time stochastic state estimation framework for continuum robots. We introduce factors based on continuous-time kinematics that are corrupted by a white noise Gaussian process (GP). By using a simple robot model paired with high-rate sensing, we show adaptability to unmodelled external forces and data dropout. The result contains an estimate of the mean and covariance for the robot's pose, velocity, and strain, each of which can be interpolated continuously in time or space. This same interpolation scheme can be used during estimation, allowing for inclusion of measurements on states that are not explicitly estimated. Our method's inherent sparsity leads to a linear solve complexity with respect to time and interpolation queries in constant time. We demonstrate our method on a CR with gyroscope and pose sensors, highlighting its versatility in real-world systems.
A Remote Sim2real Aerial Competition: Fostering Reproducibility and Solutions' Diversity in Robotics Challenges
Aug 31, 2023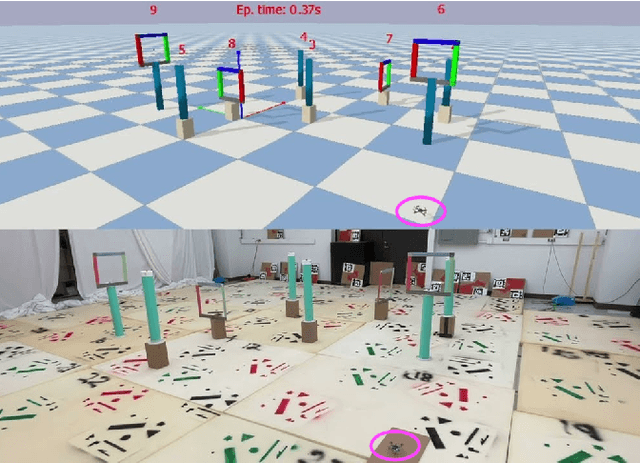

Shared benchmark problems have historically been a fundamental driver of progress for scientific communities. In the context of academic conferences, competitions offer the opportunity to researchers with different origins, backgrounds, and levels of seniority to quantitatively compare their ideas. In robotics, a hot and challenging topic is sim2real-porting approaches that work well in simulation to real robot hardware. In our case, creating a hybrid competition with both simulation and real robot components was also dictated by the uncertainties around travel and logistics in the post-COVID-19 world. Hence, this article motivates and describes an aerial sim2real robot competition that ran during the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems, from the specification of the competition task, to the details of the software infrastructure supporting simulation and real-life experiments, to the approaches of the top-placed teams and the lessons learned by participants and organizers.