 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Pre-Training for 3D Leaf Instance Segmentation
Jan 16, 2024Crops for food, feed, fiber, and fuel are key natural resources for our society. Monitoring plants and measuring their traits is an important task in agriculture often referred to as plant phenotyping. Traditionally, this task is done manually, which is time- and labor-intensive. Robots can automate phenotyping providing reproducible and high-frequency measurements. Today's perception systems use deep learning to interpret these measurements, but require a substantial amount of annotated data to work well. Obtaining such labels is challenging as it often requires background knowledge on the side of the labelers. This paper addresses the problem of reducing the labeling effort required to perform leaf instance segmentation on 3D point clouds, which is a first step toward phenotyping in 3D. Separating all leaves allows us to count them and compute relevant traits as their areas, lengths, and widths. We propose a novel self-supervised task-specific pre-training approach to initialize the backbone of a network for leaf instance segmentation. We also introduce a novel automatic postprocessing that considers the difficulty of correctly segmenting the points close to the stem, where all the leaves petiole overlap. The experiments presented in this paper suggest that our approach boosts the performance over all the investigated scenarios. We also evaluate the embeddings to assess the quality of the fully unsupervised approach and see a higher performance of our domain-specific postprocessing.
* 8 pages, 7 images, RA-L
PhenoBench -- A Large Dataset and Benchmarks for Semantic Image Interpretation in the Agricultural Domain
Jun 07, 2023



The production of food, feed, fiber, and fuel is a key task of agriculture. Especially crop production has to cope with a multitude of challenges in the upcoming decades caused by a growing world population, climate change, the need for sustainable production, lack of skilled workers, and generally the limited availability of arable land. Vision systems could help cope with these challenges by offering tools to make better and more sustainable field management decisions and support the breeding of new varieties of crops by allowing temporally dense and reproducible measurements. Recently, tackling perception tasks in the agricultural domain got increasing interest in the computer vision and robotics community since agricultural robotics are one promising solution for coping with the lack of workers and enable a more sustainable agricultural production at the same time. While large datasets and benchmarks in other domains are readily available and have enabled significant progress toward more reliable vision systems, agricultural datasets and benchmarks are comparably rare. In this paper, we present a large dataset and benchmarks for the semantic interpretation of images of real agricultural fields. Our dataset recorded with a UAV provides high-quality, dense annotations of crops and weeds, but also fine-grained labels of crop leaves at the same time, which enable the development of novel algorithms for visual perception in the agricultural domain. Together with the labeled data, we provide novel benchmarks for evaluating different visual perception tasks on a hidden test set comprised of different fields: known fields covered by the training data and a completely unseen field. The tasks cover semantic segmentation, panoptic segmentation of plants, leaf instance segmentation, detection of plants and leaves, and hierarchical panoptic segmentation for jointly identifying plants and leaves.
On Domain-Specific Pre-Training for Effective Semantic Perception in Agricultural Robotics
Mar 22, 2023



Agricultural robots have the prospect to enable more efficient and sustainable agricultural production of food, feed, and fiber. Perception of crops and weeds is a central component of agricultural robots that aim to monitor fields and assess the plants as well as their growth stage in an automatic manner. Semantic perception mostly relies on deep learning using supervised approaches, which require time and qualified workers to label fairly large amounts of data. In this paper, we look into the problem of reducing the amount of labels without compromising the final segmentation performance. For robots operating in the field, pre-training networks in a supervised way is already a popular method to reduce the number of required labeled images. We investigate the possibility of pre-training in a self-supervised fashion using data from the target domain. To better exploit this data, we propose a set of domain-specific augmentation strategies. We evaluate our pre-training on semantic segmentation and leaf instance segmentation, two important tasks in our domain. The experimental results suggest that pre-training with domain-specific data paired with our data augmentation strategy leads to superior performance compared to commonly used pre-trainings. Furthermore, the pre-trained networks obtain similar performance to the fully supervised with less labeled data.
Hierarchical Approach for Joint Semantic, Plant Instance, and Leaf Instance Segmentation in the Agricultural Domain
Oct 14, 2022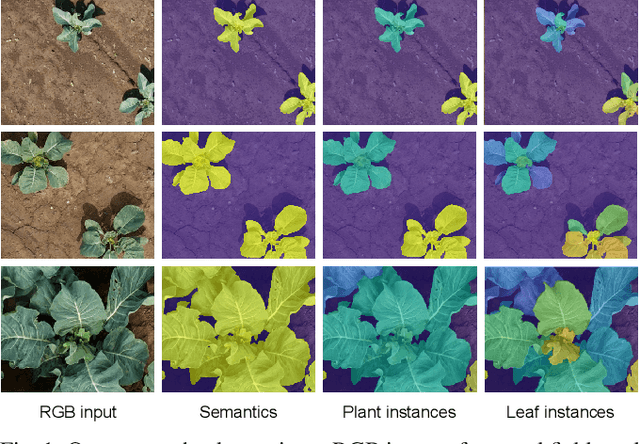
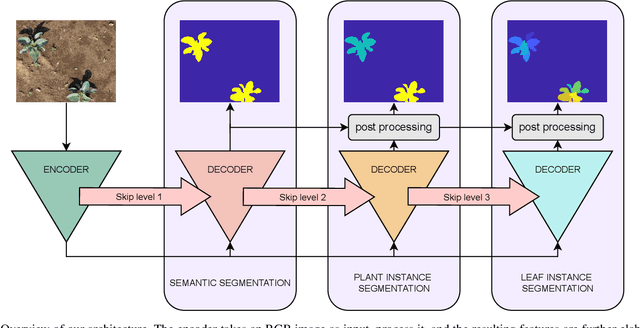


Plant phenotyping is a central task in agriculture, as it describes plants' growth stage, development, and other relevant quantities. Robots can help automate this process by accurately estimating plant traits such as the number of leaves, leaf area, and the plant size. In this paper, we address the problem of joint semantic, plant instance, and leaf instance segmentation of crop fields from RGB data. We propose a single convolutional neural network that addresses the three tasks simultaneously, exploiting their underlying hierarchical structure. We introduce task-specific skip connections, which our experimental evaluation proves to be more beneficial than the usual schemes. We also propose a novel automatic post-processing, which explicitly addresses the problem of spatially close instances, common in the agricultural domain because of overlapping leaves. Our architecture simultaneously tackles these problems jointly in the agricultural context. Previous works either focus on plant or leaf segmentation, or do not optimise for semantic segmentation. Results show that our system has superior performance to state-of-the-art approaches, while having a reduced number of parameters and is operating at camera frame rate.