 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation
Jul 30, 2024



This paper presents a novel framework for inferring timed temporal logic properties from data. The dataset comprises pairs of finite-time system traces and corresponding labels, denoting whether the traces demonstrate specific desired behaviors, e.g. whether the ship follows a safe route or not. Our proposed approach leverages decision-tree-based methods to infer Signal Temporal Logic classifiers using primitive formulae. We formulate the inference process as a mixed integer linear programming optimization problem, recursively generating constraints to determine both data classification and tree structure. Applying a max-flow algorithm on the resultant tree transforms the problem into a global optimization challenge, leading to improved classification rates compared to prior methodologies. Moreover, we introduce a technique to reduce the number of constraints by exploiting the symmetry inherent in STL primitives, which enhances the algorithm's time performance and interpretability. To assess our algorithm's effectiveness and classification performance, we conduct three case studies involving two-class, multi-class, and complex formula classification scenarios.
Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams
Jun 03, 2024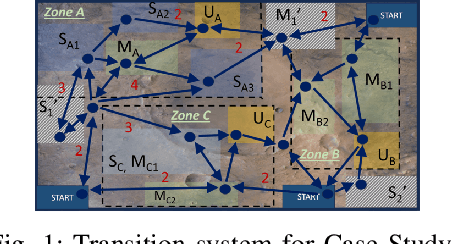
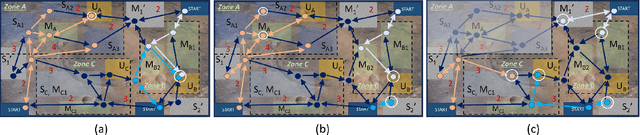
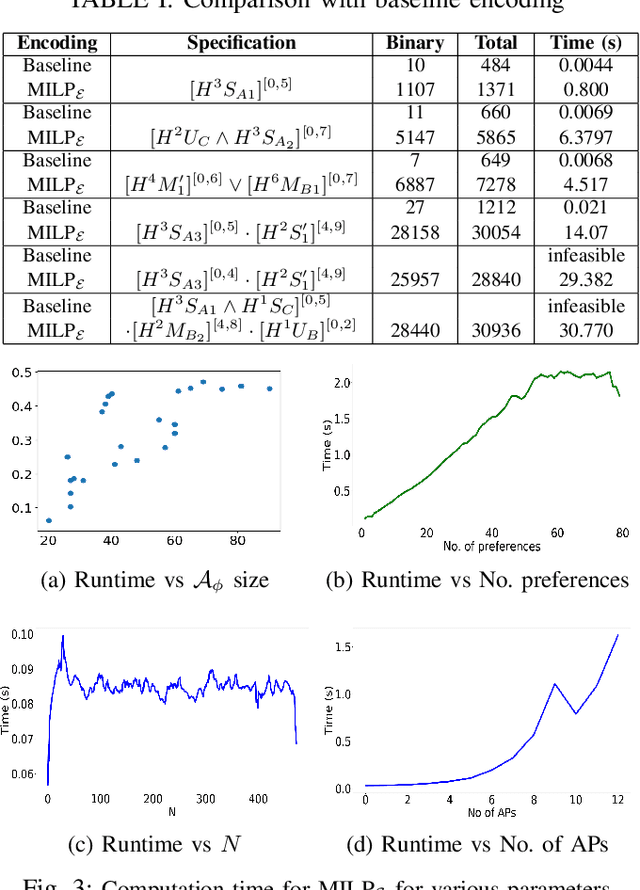
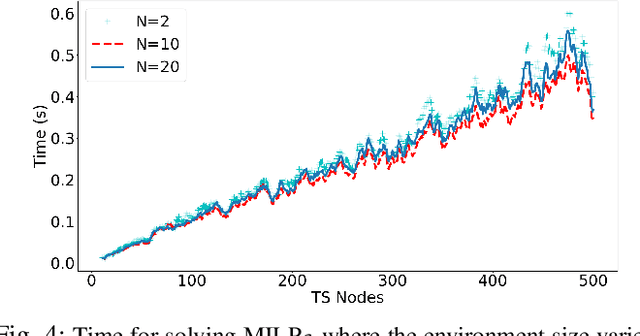
In this work, we address the problem of control synthesis for a homogeneous team of robots given a global temporal logic specification and formal user preferences for relaxation in case of infeasibility. The relaxation preferences are represented as a Weighted Finite-state Edit System and are used to compute a relaxed specification automaton that captures all allowable relaxations of the mission specification and their costs. For synthesis, we introduce a Mixed Integer Linear Programming (MILP) formulation that combines the motion of the team of robots with the relaxed specification automaton. Our approach combines automata-based and MILP-based methods and leverages the strengths of both approaches while avoiding their shortcomings. Specifically, the relaxed specification automaton explicitly accounts for the progress towards satisfaction, and the MILP-based optimization approach avoids the state-space explosion associated with explicit product-automata construction, thereby efficiently solving the problem. The case studies highlight the efficiency of the proposed approach.
Energy-Constrained Active Exploration Under Incremental-Resolution Symbolic Perception
Sep 13, 2023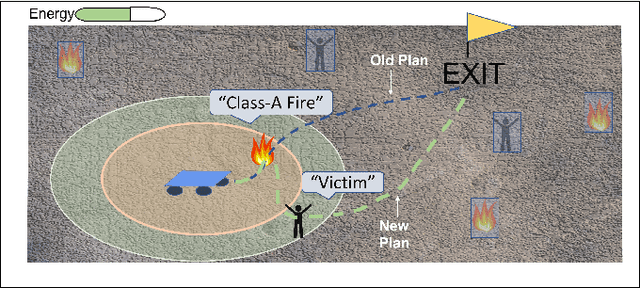
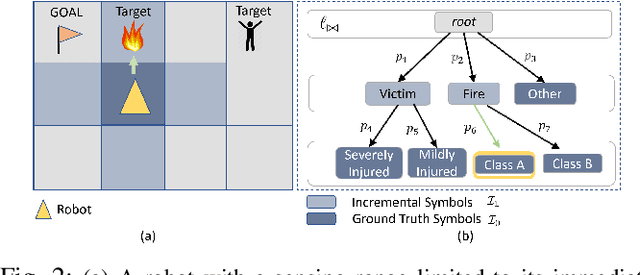
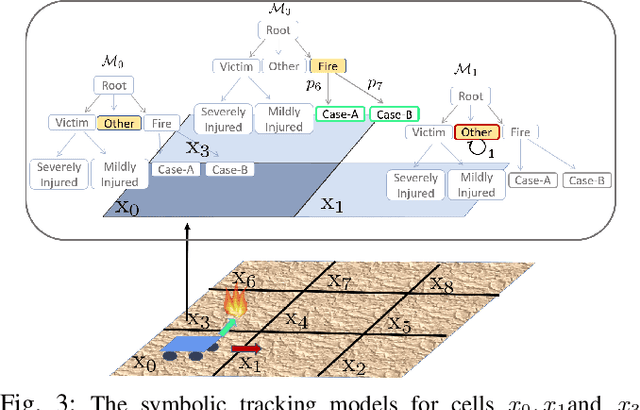
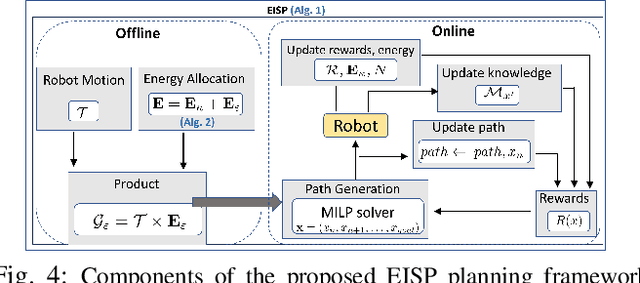
In this work, we consider the problem of autonomous exploration in search of targets while respecting a fixed energy budget. The robot is equipped with an incremental-resolution symbolic perception module wherein the perception of targets in the environment improves as the robot's distance from targets decreases. We assume no prior information about the total number of targets, their locations as well as their possible distribution within the environment. This work proposes a novel decision-making framework for the resulting constrained sequential decision-making problem by first converting it into a reward maximization problem on a product graph computed offline. It is then solved online as a Mixed-Integer Linear Program (MILP) where the knowledge about the environment is updated at each step, combining automata-based and MILP-based techniques. We demonstrate the efficacy of our approach with the help of a case study and present empirical evaluation in terms of expected regret. Furthermore, the runtime performance shows that online planning can be efficiently performed for moderately-sized grid environments.
Natural Language Robot Programming: NLP integrated with autonomous robotic grasping
Apr 06, 2023In this paper, we present a grammar-based natural language framework for robot programming, specifically for pick-and-place tasks. Our approach uses a custom dictionary of action words, designed to store together words that share meaning, allowing for easy expansion of the vocabulary by adding more action words from a lexical database. We validate our Natural Language Robot Programming (NLRP) framework through simulation and real-world experimentation, using a Franka Panda robotic arm equipped with a calibrated camera-in-hand and a microphone. Participants were asked to complete a pick-and-place task using verbal commands, which were converted into text using Google's Speech-to-Text API and processed through the NLRP framework to obtain joint space trajectories for the robot. Our results indicate that our approach has a high system usability score. The framework's dictionary can be easily extended without relying on transfer learning or large data sets. In the future, we plan to compare the presented framework with different approaches of human-assisted pick-and-place tasks via a comprehensive user study.
Symbolic Perception Risk in Autonomous Driving
Mar 16, 2023



We develop a novel framework to assess the risk of misperception in a traffic sign classification task in the presence of exogenous noise. We consider the problem in an autonomous driving setting, where visual input quality gradually improves due to improved resolution, and less noise since the distance to traffic signs decreases. Using the estimated perception statistics obtained using the standard classification algorithms, we aim to quantify the risk of misperception to mitigate the effects of imperfect visual observation. By exploring perception outputs, their expected high-level actions, and potential costs, we show the closed-form representation of the conditional value-at-risk (CVaR) of misperception. Several case studies support the effectiveness of our proposed methodology.
Cautious Planning with Incremental Symbolic Perception: Designing Verified Reactive Driving Maneuvers
Sep 20, 2022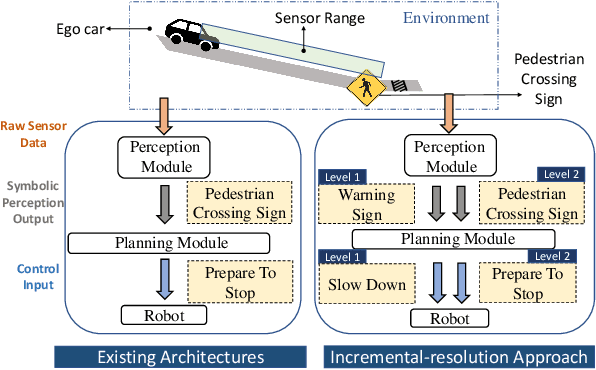
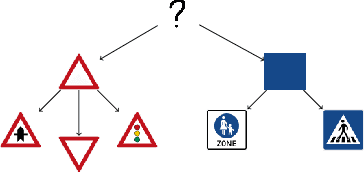
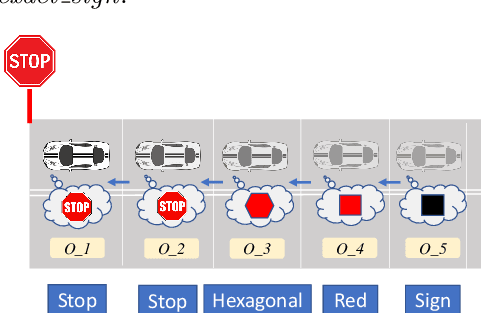
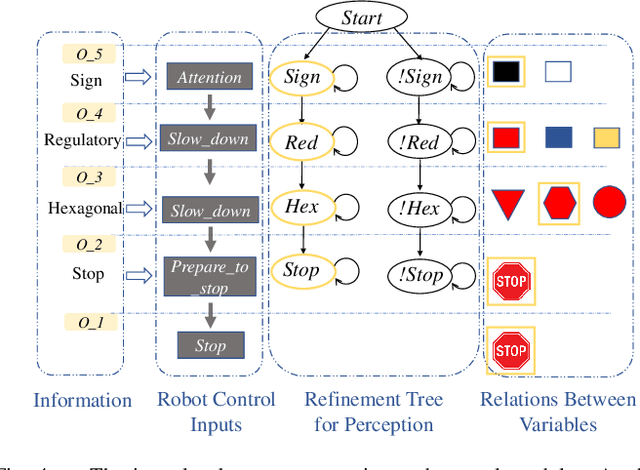
This work presents a step towards utilizing incrementally-improving symbolic perception knowledge of the robot's surroundings for provably correct reactive control synthesis applied to an autonomous driving problem. Combining abstract models of motion control and information gathering, we show that assume-guarantee specifications (a subclass of Linear Temporal Logic) can be used to define and resolve traffic rules for cautious planning. We propose a novel representation called symbolic refinement tree for perception that captures the incremental knowledge about the environment and embodies the relationships between various symbolic perception inputs. The incremental knowledge is leveraged for synthesizing verified reactive plans for the robot. The case studies demonstrate the efficacy of the proposed approach in synthesizing control inputs even in case of partially occluded environments.
Automata-based Optimal Planning with Relaxed Specifications
Jul 28, 2021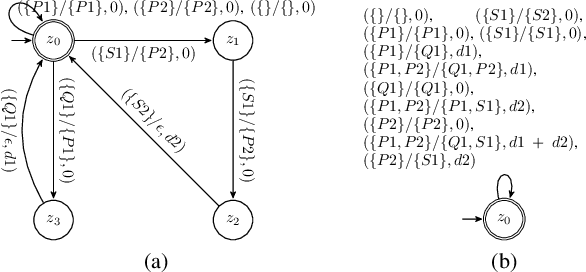
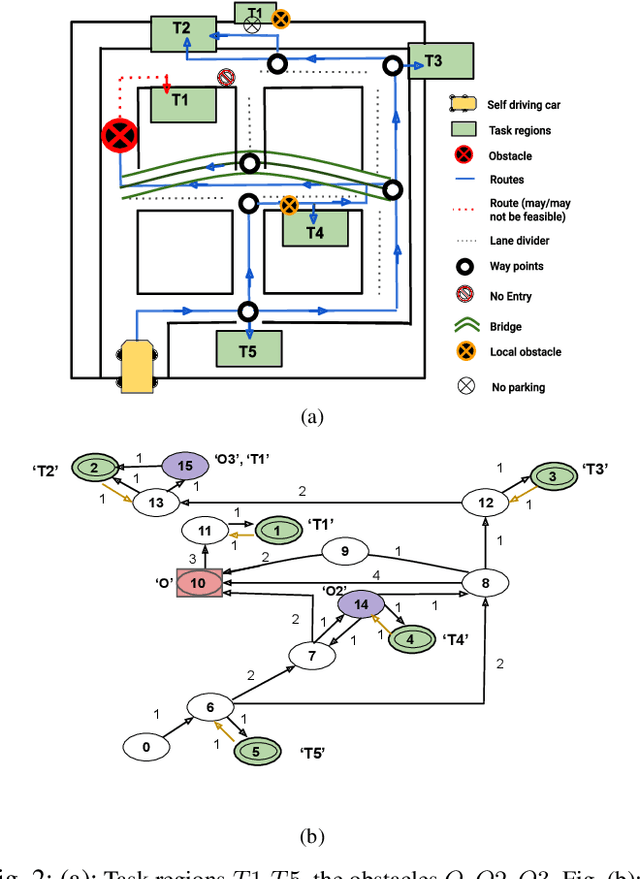

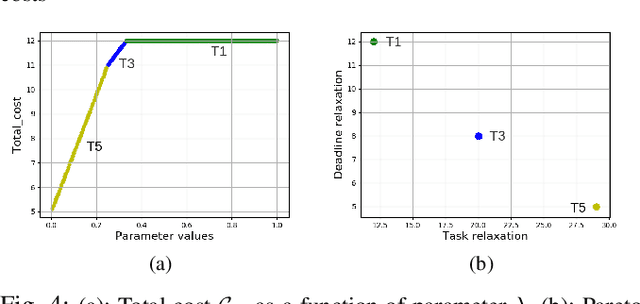
In this paper, we introduce an automata-based framework for planning with relaxed specifications. User relaxation preferences are represented as weighted finite state edit systems that capture permissible operations on the specification, substitution and deletion of tasks, with complex constraints on ordering and grouping. We propose a three-way product automaton construction method that allows us to compute minimal relaxation policies for the robots using standard shortest path algorithms. The three-way automaton captures the robot's motion, specification satisfaction, and available relaxations at the same time. Additionally, we consider a bi-objective problem that balances temporal relaxation of deadlines within specifications with changing and deleting tasks. Finally, we present the runtime performance and a case study that highlights different modalities of our framework.