 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams
Paper and Code
Jun 03, 2024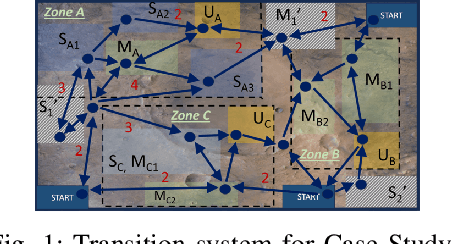
In this work, we address the problem of control synthesis for a homogeneous team of robots given a global temporal logic specification and formal user preferences for relaxation in case of infeasibility. The relaxation preferences are represented as a Weighted Finite-state Edit System and are used to compute a relaxed specification automaton that captures all allowable relaxations of the mission specification and their costs. For synthesis, we introduce a Mixed Integer Linear Programming (MILP) formulation that combines the motion of the team of robots with the relaxed specification automaton. Our approach combines automata-based and MILP-based methods and leverages the strengths of both approaches while avoiding their shortcomings. Specifically, the relaxed specification automaton explicitly accounts for the progress towards satisfaction, and the MILP-based optimization approach avoids the state-space explosion associated with explicit product-automata construction, thereby efficiently solving the problem. The case studies highlight the efficiency of the proposed approach.