 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Seamless Physical Human-Humanoid Interaction: Insights from Control, Intent, and Modeling with a Vision for What Comes Next
Dec 08, 2025Physical Human-Humanoid Interaction (pHHI) is a rapidly advancing field with significant implications for deploying robots in unstructured, human-centric environments. In this review, we examine the current state of the art in pHHI through three core pillars: (i) humanoid modeling and control, (ii) human intent estimation, and (iii) computational human models. For each pillar, we survey representative approaches, identify open challenges, and analyze current limitations that hinder robust, scalable, and adaptive interaction. These include the need for whole-body control strategies capable of handling uncertain human dynamics, real-time intent inference under limited sensing, and modeling techniques that account for variability in human physical states. Although significant progress has been made within each domain, integration across pillars remains limited. We propose pathways for unifying methods across these areas to enable cohesive interaction frameworks. This structure enables us not only to map the current landscape but also to propose concrete directions for future research that aim to bridge these domains. Additionally, we introduce a unified taxonomy of interaction types based on modality, distinguishing between direct interactions (e.g., physical contact) and indirect interactions (e.g., object-mediated), and on the level of robot engagement, ranging from assistance to cooperation and collaboration. For each category in this taxonomy, we provide the three core pillars that highlight opportunities for cross-pillar unification. Our goal is to suggest avenues to advance robust, safe, and intuitive physical interaction, providing a roadmap for future research that will allow humanoid systems to effectively understand, anticipate, and collaborate with human partners in diverse real-world settings.
An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Resource Transportation Uncertainty and Temporal Logic Goals
Aug 26, 2025This paper presents an iterative approach for heterogeneous multi-agent route planning in environments with unknown resource distributions. We focus on a team of robots with diverse capabilities tasked with executing missions specified using Capability Temporal Logic (CaTL), a formal framework built on Signal Temporal Logic to handle spatial, temporal, capability, and resource constraints. The key challenge arises from the uncertainty in the initial distribution and quantity of resources in the environment. To address this, we introduce an iterative algorithm that dynamically balances exploration and task fulfillment. Robots are guided to explore the environment, identifying resource locations and quantities while progressively refining their understanding of the resource landscape. At the same time, they aim to maximally satisfy the mission objectives based on the current information, adapting their strategies as new data is uncovered. This approach provides a robust solution for planning in dynamic, resource-constrained environments, enabling efficient coordination of heterogeneous teams even under conditions of uncertainty. Our method's effectiveness and performance are demonstrated through simulated case studies.
Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation
Jul 30, 2024



This paper presents a novel framework for inferring timed temporal logic properties from data. The dataset comprises pairs of finite-time system traces and corresponding labels, denoting whether the traces demonstrate specific desired behaviors, e.g. whether the ship follows a safe route or not. Our proposed approach leverages decision-tree-based methods to infer Signal Temporal Logic classifiers using primitive formulae. We formulate the inference process as a mixed integer linear programming optimization problem, recursively generating constraints to determine both data classification and tree structure. Applying a max-flow algorithm on the resultant tree transforms the problem into a global optimization challenge, leading to improved classification rates compared to prior methodologies. Moreover, we introduce a technique to reduce the number of constraints by exploiting the symmetry inherent in STL primitives, which enhances the algorithm's time performance and interpretability. To assess our algorithm's effectiveness and classification performance, we conduct three case studies involving two-class, multi-class, and complex formula classification scenarios.
A Flexible and Efficient Temporal Logic Tool for Python: PyTeLo
Oct 12, 2023



Temporal logic is an important tool for specifying complex behaviors of systems. It can be used to define properties for verification and monitoring, as well as goals for synthesis tools, allowing users to specify rich missions and tasks. Some of the most popular temporal logics include Metric Temporal Logic (MTL), Signal Temporal Logic (STL), and weighted STL (wSTL), which also allow the definition of timing constraints. In this work, we introduce PyTeLo, a modular and versatile Python-based software that facilitates working with temporal logic languages, specifically MTL, STL, and wSTL. Applying PyTeLo requires only a string representation of the temporal logic specification and, optionally, the dynamics of the system of interest. Next, PyTeLo reads the specification using an ANTLR-generated parser and generates an Abstract Syntax Tree (AST) that captures the structure of the formula. For synthesis, the AST serves to recursively encode the specification into a Mixed Integer Linear Program (MILP) that is solved using a commercial solver such as Gurobi. We describe the architecture and capabilities of PyTeLo and provide example applications highlighting its adaptability and extensibility for various research problems.
Event-Triggered Control for Weight-Unbalanced Directed Networks
Aug 22, 2021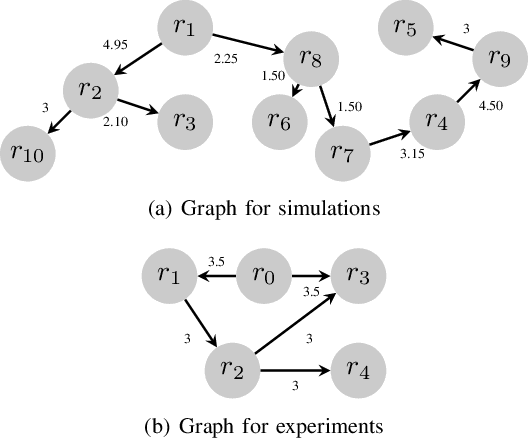
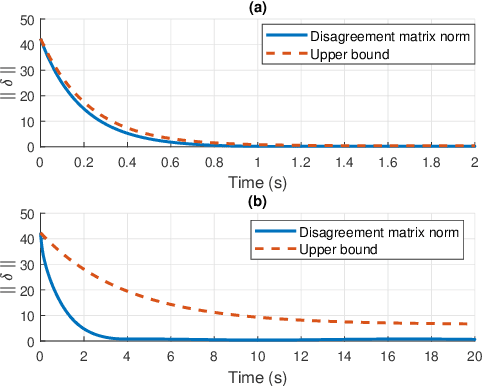
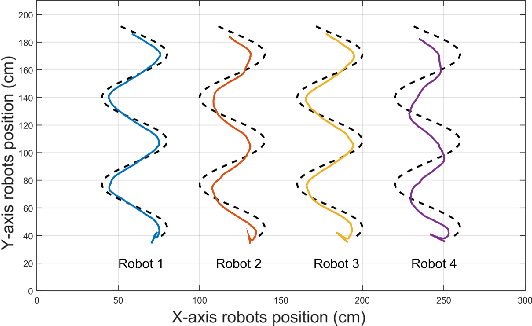
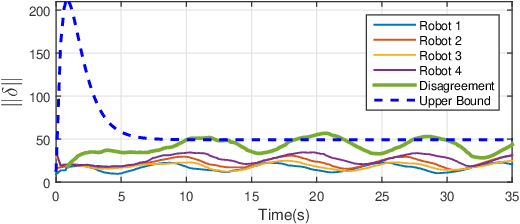
We develop an event-triggered control strategy for a weighted-unbalanced directed homogeneous robot network to reach a dynamic consensus in this work. We present some guarantees for synchronizing a robot network when all robots have access to the reference and when a limited number of robots have access. The proposed event-triggered control can reduce and avoid the periodic updating of the signals. Unlike some current control methods, we prove stability by making use of a logarithmic norm, which extends the possibilities of the control law to be applied to a wide range of directed graphs, in contrast to other works where the event-triggered control can be only implemented over strongly connected and weight-balanced digraphs. We test the performance of our algorithm by carrying out experiments both in simulation and in a real team of robots.
Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot
Aug 03, 2021


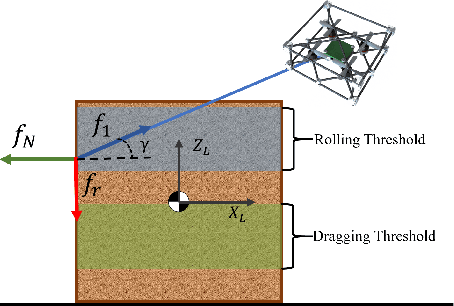
Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.
The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors
Mar 02, 2021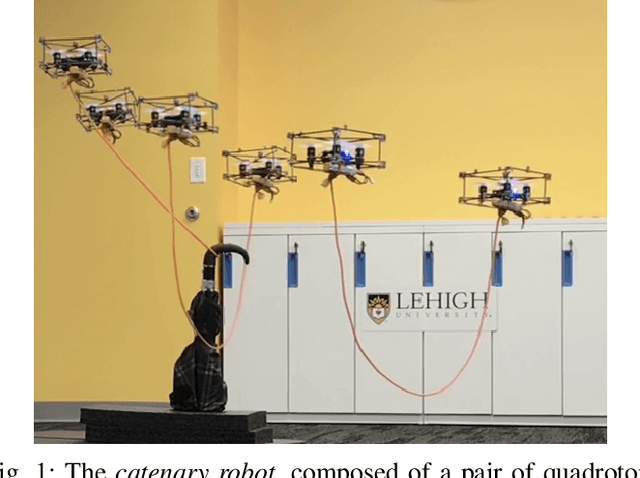

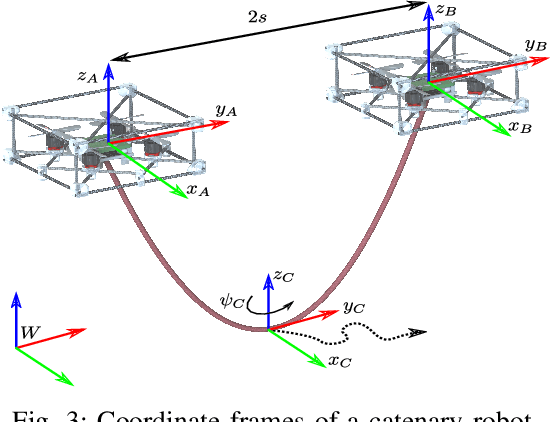

Transporting objects using aerial robots has been widely studied in the literature. Still, those approaches always assume that the connection between the quadrotor and the load is made in a previous stage. However, that previous stage usually requires human intervention, and autonomous procedures to locate and attach the object are not considered. Additionally, most of the approaches assume cables as rigid links, but manipulating cables requires considering the state when the cables are hanging. In this work, we design and control a catenary robot. Our robot is able to transport hook-shaped objects in the environment. The robotic system is composed of two quadrotors attached to the two ends of a cable. By defining the catenary curve with five degrees of freedom, position in 3-D, orientation in the z-axis, and span, we can drive the two quadrotors to track a given trajectory. We validate our approach with simulations and real robots. We present four different scenarios of experiments. Our numerical solution is computationally fast and can be executed in real-time.