 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Ellipsoids to Midair Control of Dynamic Hitches
Feb 08, 2026The ability to dynamically manipulate interaction between cables, carried by pairs of aerial vehicles attached to the ends of each cable, can greatly improve the versatility and agility of cable-assisted aerial manipulation. Such interlacing cables create hitches by winding two or more cables around each other, which can enclose payloads or can further develop into knots. Dynamic modeling and control of such hitches is key to mastering the inter-cable manipulation in context of cable-suspended aerial manipulation. This paper introduces an ellipsoid-based kinematic model to connect the geometric nature of a hitch created by two cables and the dynamics of the hitch driven by four aerial vehicles, which reveals the control-affine form of the system. As the constraint for maintaining tension of a cable is also control-affine, we design a quadratic programming-based controller that combines Control Lyapunov and High-Order Control Barrier Functions (CLF-HOCBF-QP) to precisely track a desired hitch position and system shape while enforcing safety constraints like cable tautness. We convert desired geometric reference configurations into target robot positions and introduce a composite error into the Lyapunov function to ensure a relative degree of one to the input. Numerical simulations validate our approach, demonstrating stable, high-speed tracking of dynamic references.
The Spinning Blimp: Design and Control of a Novel Minimalist Aerial Vehicle Leveraging Rotational Dynamics and Locomotion
Mar 06, 2025This paper presents the Spinning Blimp, a novel lighter-than-air (LTA) aerial vehicle designed for low-energy stable flight. Utilizing an oblate spheroid helium balloon for buoyancy, the vehicle achieves minimal energy consumption while maintaining prolonged airborne states. The unique and low-cost design employs a passively arranged wing coupled with a propeller to induce a spinning behavior, providing inherent pendulum-like stabilization. We propose a control strategy that takes advantage of the continuous revolving nature of the spinning blimp to control translational motion. The cost-effectiveness of the vehicle makes it highly suitable for a variety of applications, such as patrolling, localization, air and turbulence monitoring, and domestic surveillance. Experimental evaluations affirm the design's efficacy and underscore its potential as a versatile and economically viable solution for aerial applications.
MochiSwarm: A testbed for robotic blimps in realistic environments
Mar 05, 2025Testing aerial robots in tasks such as pickup-and-delivery and surveillance significantly benefits from high energy efficiency and scalability of the deployed robotic system. This paper presents MochiSwarm, an open-source testbed of light-weight robotic blimps, ready for multi-robot operation without external localization. We introduce the system design in hardware, software, and perception, which capitalizes on modularity, low cost, and light weight. The hardware allows for rapid modification, which enables the integration of additional sensors to enhance autonomy for different scenarios. The software framework supports different actuation models and communication between the base station and multiple blimps. The detachable perception module allows independent blimps to perform tasks that involve detection and autonomous actuation. We showcase a differential-drive module as an example, of which the autonomy is enabled by visual servoing using the perception module. A case study of pickup-and-delivery tasks with up to 12 blimps highlights the autonomy of the MochiSwarm without external infrastructures.
A Novel Low-Cost, Recyclable, Easy-to-Build Robot Blimp For Transporting Supplies in Hard-to-Reach Locations
Sep 13, 2023



Rural communities in remote areas often encounter significant challenges when it comes to accessing emergency healthcare services and essential supplies due to a lack of adequate transportation infrastructure. The situation is further exacerbated by poorly maintained, damaged, or flooded roads, making it arduous for rural residents to obtain the necessary aid in critical situations. Limited budgets and technological constraints pose additional obstacles, hindering the prompt response of local rescue teams during emergencies. The transportation of crucial resources, such as medical supplies and food, plays a vital role in saving lives in these situations. In light of these obstacles, our objective is to improve accessibility and alleviate the suffering of vulnerable populations by automating transportation tasks using low-cost robotic systems. We propose a low-cost, easy-to-build blimp robot (UAVs), that can significantly enhance the efficiency and effectiveness of local emergency responses.
SBlimp: Design, Model, and Translational Motion Control for a Swing-Blimp
Aug 01, 2023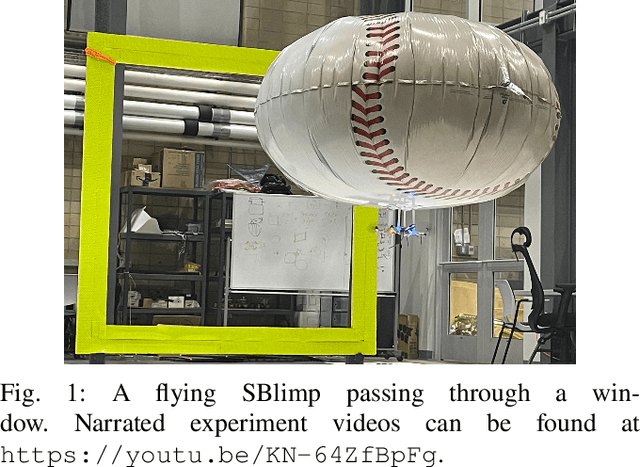
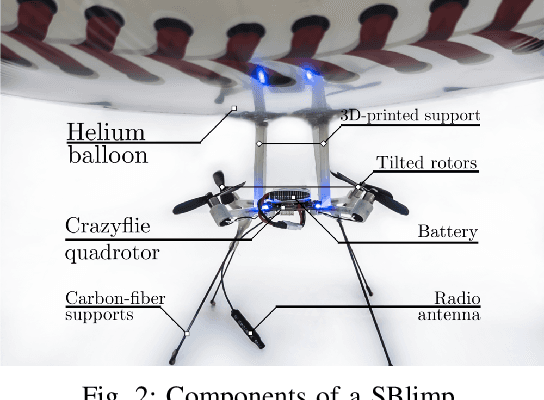
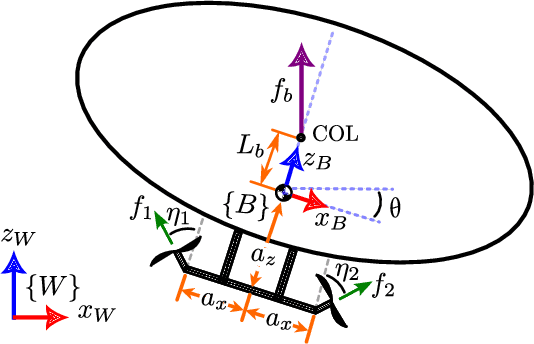

We present an aerial vehicle composed of a custom quadrotor with tilted rotors and a helium balloon, called SBlimp. We propose a novel control strategy that takes advantage of the natural stable attitude of the blimp to control translational motion. Different from cascade controllers in the literature that controls attitude to achieve desired translational motion, our approach directly controls the linear velocity regardless of the heading orientation of the vehicle. As a result, the vehicle swings during the translational motion. We provide a planar analysis of the dynamic model, demonstrating stability for our controller. Our design is evaluated in numerical simulations with different physical factors and validated with experiments using a real-world prototype, showing that the SBlimp is able to achieve stable translation regardless of its orientation.
Learning to Navigate in Turbulent Flows with Aerial Robot Swarms: A Cooperative Deep Reinforcement Learning Approach
Jun 07, 2023Aerial operation in turbulent environments is a challenging problem due to the chaotic behavior of the flow. This problem is made even more complex when a team of aerial robots is trying to achieve coordinated motion in turbulent wind conditions. In this paper, we present a novel multi-robot controller to navigate in turbulent flows, decoupling the trajectory-tracking control from the turbulence compensation via a nested control architecture. Unlike previous works, our method does not learn to compensate for the air-flow at a specific time and space. Instead, our method learns to compensate for the flow based on its effect on the team. This is made possible via a deep reinforcement learning approach, implemented via a Graph Convolutional Neural Network (GCNN)-based architecture, which enables robots to achieve better wind compensation by processing the spatial-temporal correlation of wind flows across the team. Our approach scales well to large robot teams -- as each robot only uses information from its nearest neighbors -- , and generalizes well to robot teams larger than seen in training. Simulated experiments demonstrate how information sharing improves turbulence compensation in a team of aerial robots and demonstrate the flexibility of our method over different team configurations.
Finding Optimal Modular Robots for Aerial Tasks
May 29, 2023Traditional aerial vehicles have limitations in their capabilities due to actuator constraints, such as motor saturation. The hardware components and their arrangement are designed to satisfy specific requirements and are difficult to modify during operation. To address this problem, we introduce a versatile modular multi-rotor vehicle that can change its capabilities by reconfiguration. Our modular robot consists of homogeneous cuboid modules, propelled by quadrotors with tilted rotors. Depending on the number of modules and their configuration, the robot can expand its actuation capabilities. In this paper, we build a mathematical model for the actuation capability of a modular multi-rotor vehicle and develop methods to determine if a vehicle is capable of satisfying a task requirement. Based on this result, we find the optimal configurations for a given task. Our approach is validated in realistic 3D simulations, showing that our modular system can adapt to tasks with varying requirements.
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023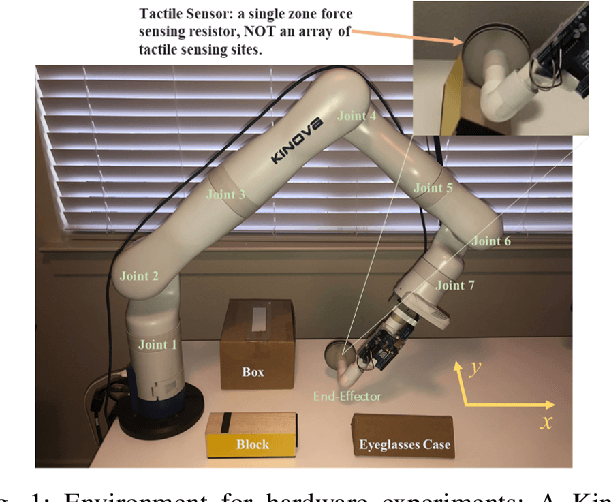
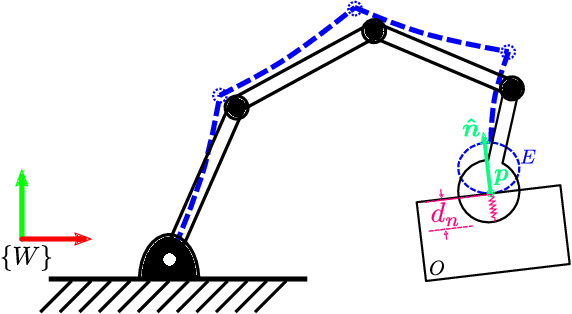
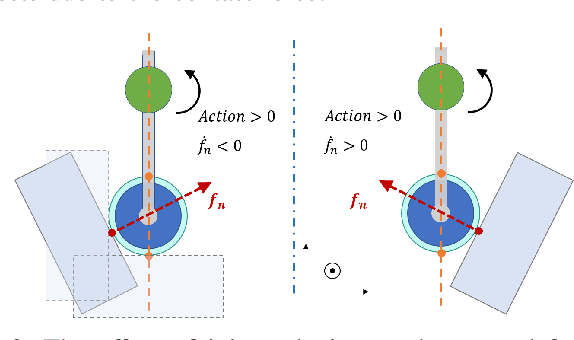
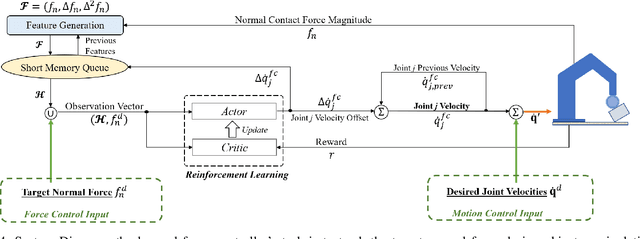
Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
Dynamic Crowd Vetting: Collaborative Detection of Malicious Robots in Dynamic Communication Networks
Apr 02, 2023Coordination in a large number of networked robots is a challenging task, especially when robots are constantly moving around the environment and there are malicious attacks within the network. Various approaches in the literature exist for detecting malicious robots, such as message sampling or suspicious behavior analysis. However, these approaches require every robot to sample every other robot in the network, leading to a slow detection process that degrades team performance. This paper introduces a method that significantly decreases the detection time for legitimate robots to identify malicious robots in a scenario where legitimate robots are randomly moving around the environment. Our method leverages the concept of ``Dynamic Crowd Vetting" by utilizing observations from random encounters and trusted neighboring robots' opinions to quickly improve the accuracy of detecting malicious robots. The key intuition is that as long as each legitimate robot accurately estimates the legitimacy of at least some fixed subset of the team, the second-hand information they receive from trusted neighbors is enough to correct any misclassifications and provide accurate trust estimations of the rest of the team. We show that the size of this fixed subset can be characterized as a function of fundamental graph and random walk properties. Furthermore, we formally show that as the number of robots in the team increases the detection time remains constant. We develop a closed form expression for the critical number of time-steps required for our algorithm to successfully identify the true legitimacy of each robot to within a specified failure probability. Our theoretical results are validated through simulations demonstrating significant reductions in detection time when compared to previous works that do not leverage trusted neighbor information.
Forming and Controlling Hitches in Midair Using Aerial Robots
Mar 13, 2023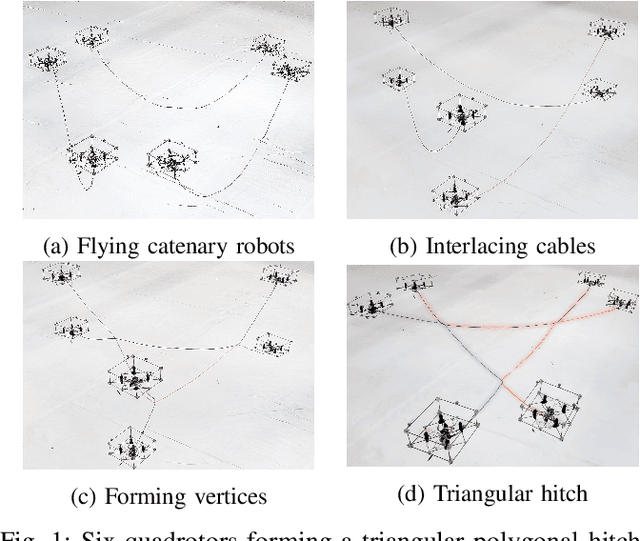
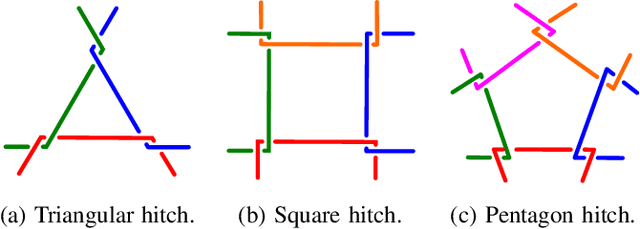
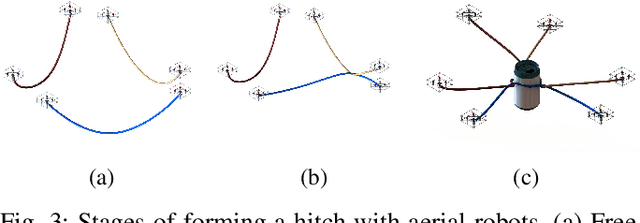
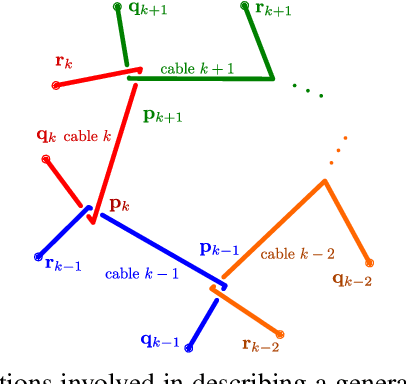
The use of cables for aerial manipulation has shown to be a lightweight and versatile way to interact with objects. However, fastening objects using cables is still a challenge and human is required. In this work, we propose a novel way to secure objects using hitches. The hitch can be formed and morphed in midair using a team of aerial robots with cables. The hitch's shape is modeled as a convex polygon, making it versatile and adaptable to a wide variety of objects. We propose an algorithm to form the hitch systematically. The steps can run in parallel, allowing hitches with a large number of robots to be formed in constant time. We develop a set of actions that include different actions to change the shape of the hitch. We demonstrate our methods using a team of aerial robots via simulation and actual experiments.