 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFolding Knots Using a Team of Aerial Robots
Paper and Code
Aug 02, 2022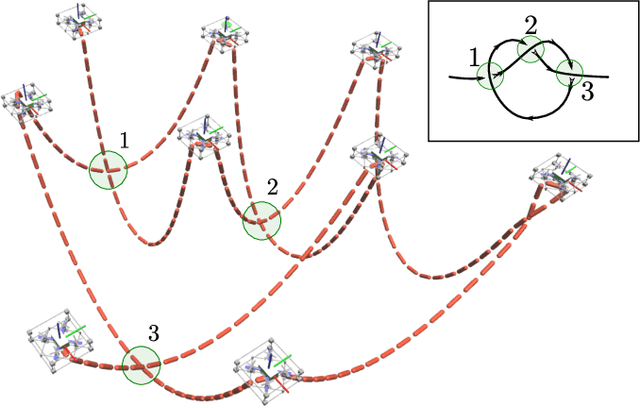
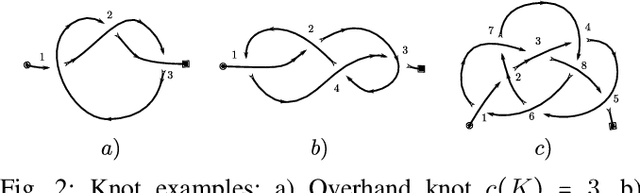
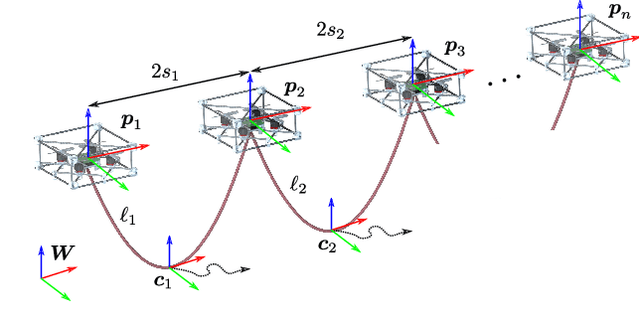
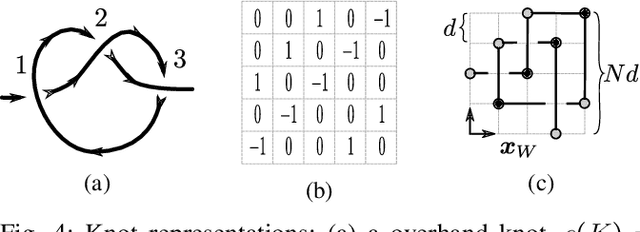
From ancient times, humans have been using cables and ropes to tie, carry, and manipulate objects by folding knots. However, automating knot folding is challenging because it requires dexterity to move a cable over and under itself. In this paper, we propose a method to fold knots in midair using a team of aerial vehicles. We take advantage of the fact that vehicles are able to fly in between cable segments without any re-grasping. So the team grasps the cable from the floor, and releases it once the knot is folded. Based on a composition of catenary curves, we simplify the complexity of dealing with an infinite-dimensional configuration space of the cable, and formally propose a new knot representation. Such representation allows us to design a trajectory that can be used to fold knots using a leader-follower approach. We show that our method works for different types of knots in simulations. Additionally, we show that our solution is also computationally efficient and can be executed in real-time.