 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Spinning Blimp: Design and Control of a Novel Minimalist Aerial Vehicle Leveraging Rotational Dynamics and Locomotion
Mar 06, 2025This paper presents the Spinning Blimp, a novel lighter-than-air (LTA) aerial vehicle designed for low-energy stable flight. Utilizing an oblate spheroid helium balloon for buoyancy, the vehicle achieves minimal energy consumption while maintaining prolonged airborne states. The unique and low-cost design employs a passively arranged wing coupled with a propeller to induce a spinning behavior, providing inherent pendulum-like stabilization. We propose a control strategy that takes advantage of the continuous revolving nature of the spinning blimp to control translational motion. The cost-effectiveness of the vehicle makes it highly suitable for a variety of applications, such as patrolling, localization, air and turbulence monitoring, and domestic surveillance. Experimental evaluations affirm the design's efficacy and underscore its potential as a versatile and economically viable solution for aerial applications.
CrackNex: a Few-shot Low-light Crack Segmentation Model Based on Retinex Theory for UAV Inspections
Mar 05, 2024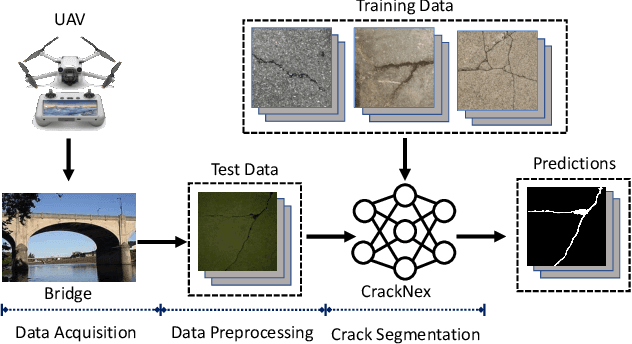
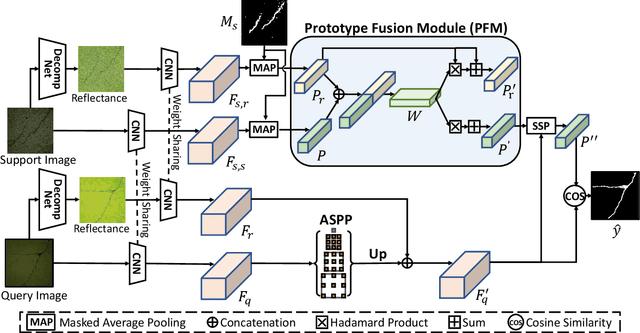
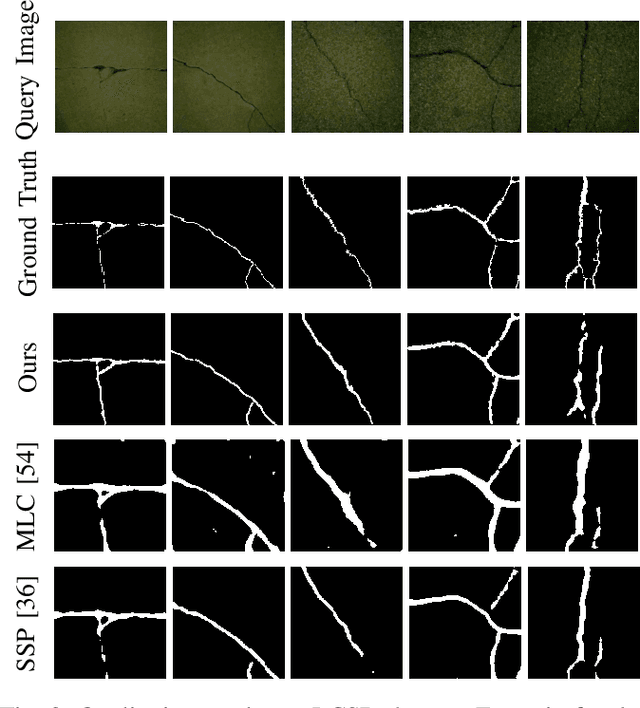
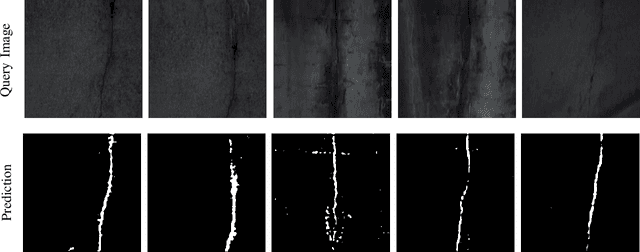
Routine visual inspections of concrete structures are imperative for upholding the safety and integrity of critical infrastructure. Such visual inspections sometimes happen under low-light conditions, e.g., checking for bridge health. Crack segmentation under such conditions is challenging due to the poor contrast between cracks and their surroundings. However, most deep learning methods are designed for well-illuminated crack images and hence their performance drops dramatically in low-light scenes. In addition, conventional approaches require many annotated low-light crack images which is time-consuming. In this paper, we address these challenges by proposing CrackNex, a framework that utilizes reflectance information based on Retinex Theory to help the model learn a unified illumination-invariant representation. Furthermore, we utilize few-shot segmentation to solve the inefficient training data problem. In CrackNex, both a support prototype and a reflectance prototype are extracted from the support set. Then, a prototype fusion module is designed to integrate the features from both prototypes. CrackNex outperforms the SOTA methods on multiple datasets. Additionally, we present the first benchmark dataset, LCSD, for low-light crack segmentation. LCSD consists of 102 well-illuminated crack images and 41 low-light crack images. The dataset and code are available at https://github.com/zy1296/CrackNex.
A Novel Low-Cost, Recyclable, Easy-to-Build Robot Blimp For Transporting Supplies in Hard-to-Reach Locations
Sep 13, 2023



Rural communities in remote areas often encounter significant challenges when it comes to accessing emergency healthcare services and essential supplies due to a lack of adequate transportation infrastructure. The situation is further exacerbated by poorly maintained, damaged, or flooded roads, making it arduous for rural residents to obtain the necessary aid in critical situations. Limited budgets and technological constraints pose additional obstacles, hindering the prompt response of local rescue teams during emergencies. The transportation of crucial resources, such as medical supplies and food, plays a vital role in saving lives in these situations. In light of these obstacles, our objective is to improve accessibility and alleviate the suffering of vulnerable populations by automating transportation tasks using low-cost robotic systems. We propose a low-cost, easy-to-build blimp robot (UAVs), that can significantly enhance the efficiency and effectiveness of local emergency responses.