 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Crowd Vetting: Collaborative Detection of Malicious Robots in Dynamic Communication Networks
Apr 02, 2023Coordination in a large number of networked robots is a challenging task, especially when robots are constantly moving around the environment and there are malicious attacks within the network. Various approaches in the literature exist for detecting malicious robots, such as message sampling or suspicious behavior analysis. However, these approaches require every robot to sample every other robot in the network, leading to a slow detection process that degrades team performance. This paper introduces a method that significantly decreases the detection time for legitimate robots to identify malicious robots in a scenario where legitimate robots are randomly moving around the environment. Our method leverages the concept of ``Dynamic Crowd Vetting" by utilizing observations from random encounters and trusted neighboring robots' opinions to quickly improve the accuracy of detecting malicious robots. The key intuition is that as long as each legitimate robot accurately estimates the legitimacy of at least some fixed subset of the team, the second-hand information they receive from trusted neighbors is enough to correct any misclassifications and provide accurate trust estimations of the rest of the team. We show that the size of this fixed subset can be characterized as a function of fundamental graph and random walk properties. Furthermore, we formally show that as the number of robots in the team increases the detection time remains constant. We develop a closed form expression for the critical number of time-steps required for our algorithm to successfully identify the true legitimacy of each robot to within a specified failure probability. Our theoretical results are validated through simulations demonstrating significant reductions in detection time when compared to previous works that do not leverage trusted neighbor information.
Exploiting Trust for Resilient Hypothesis Testing with Malicious Robots (evolved version)
Mar 07, 2023



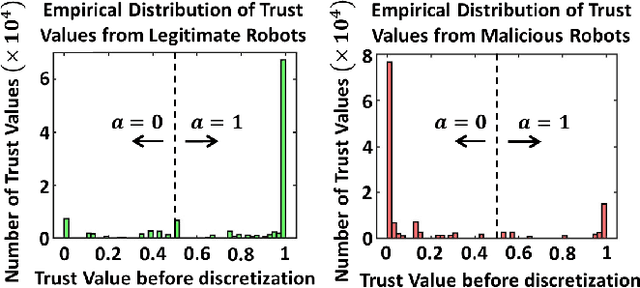
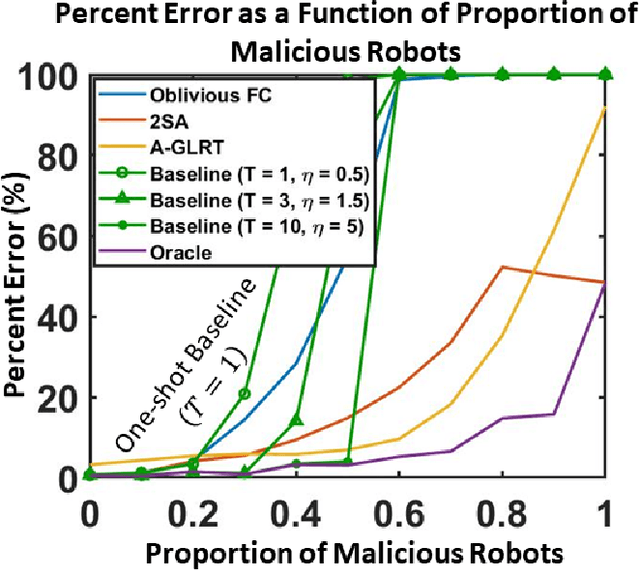
We develop a resilient binary hypothesis testing framework for decision making in adversarial multi-robot crowdsensing tasks. This framework exploits stochastic trust observations between robots to arrive at tractable, resilient decision making at a centralized Fusion Center (FC) even when i) there exist malicious robots in the network and their number may be larger than the number of legitimate robots, and ii) the FC uses one-shot noisy measurements from all robots. We derive two algorithms to achieve this. The first is the Two Stage Approach (2SA) that estimates the legitimacy of robots based on received trust observations, and provably minimizes the probability of detection error in the worst-case malicious attack. Here, the proportion of malicious robots is known but arbitrary. For the case of an unknown proportion of malicious robots, we develop the Adversarial Generalized Likelihood Ratio Test (A-GLRT) that uses both the reported robot measurements and trust observations to estimate the trustworthiness of robots, their reporting strategy, and the correct hypothesis simultaneously. We exploit special problem structure to show that this approach remains computationally tractable despite several unknown problem parameters. We deploy both algorithms in a hardware experiment where a group of robots conducts crowdsensing of traffic conditions on a mock-up road network similar in spirit to Google Maps, subject to a Sybil attack. We extract the trust observations for each robot from actual communication signals which provide statistical information on the uniqueness of the sender. We show that even when the malicious robots are in the majority, the FC can reduce the probability of detection error to 30.5% and 29% for the 2SA and the A-GLRT respectively.
Exploiting Trust for Resilient Hypothesis Testing with Malicious Robots
Sep 25, 2022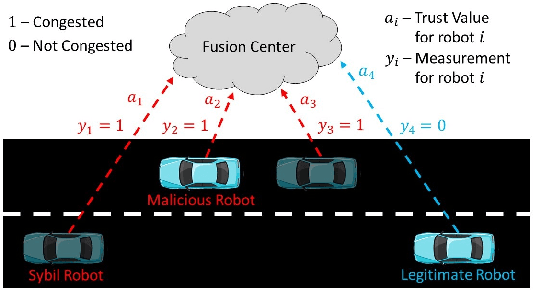

We develop a resilient binary hypothesis testing framework for decision making in adversarial multi-robot crowdsensing tasks. This framework exploits stochastic trust observations between robots to arrive at tractable, resilient decision making at a centralized Fusion Center (FC) even when i) there exist malicious robots in the network and their number may be larger than the number of legitimate robots, and ii) the FC uses one-shot noisy measurements from all robots. We derive two algorithms to achieve this. The first is the Two Stage Approach (2SA) that estimates the legitimacy of robots based on received trust observations, and provably minimizes the probability of detection error in the worst-case malicious attack. Here, the proportion of malicious robots is known but arbitrary. For the case of an unknown proportion of malicious robots, we develop the Adversarial Generalized Likelihood Ratio Test (A-GLRT) that uses both the reported robot measurements and trust observations to estimate the trustworthiness of robots, their reporting strategy, and the correct hypothesis simultaneously. We exploit special problem structure to show that this approach remains computationally tractable despite several unknown problem parameters. We deploy both algorithms in a hardware experiment where a group of robots conducts crowdsensing of traffic conditions on a mock-up road network similar in spirit to Google Maps, subject to a Sybil attack. We extract the trust observations for each robot from actual communication signals which provide statistical information on the uniqueness of the sender. We show that even when the malicious robots are in the majority, the FC can reduce the probability of detection error to 30.5% and 29% for the 2SA and the A-GLRT respectively.
Crowd Vetting: Rejecting Adversaries via Collaboration--with Application to Multi-Robot Flocking
Dec 11, 2020


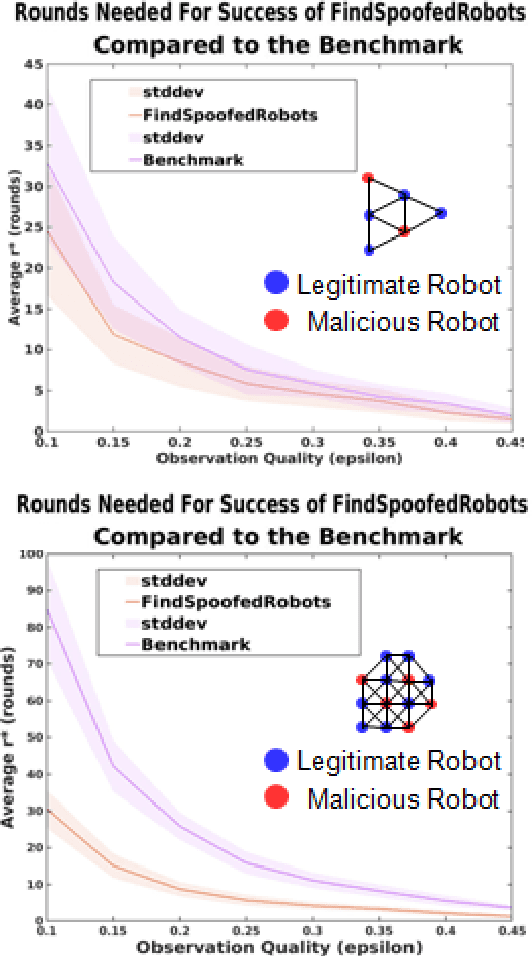
We characterize the advantage of using a robot's neighborhood to find and eliminate adversarial robots in the presence of a Sybil attack. We show that by leveraging the opinions of its neighbors on the trustworthiness of transmitted data, robots can detect adversaries with high probability. We characterize a number of communication rounds required to achieve this result to be a function of the communication quality and the proportion of legitimate to malicious robots. This result enables increased resiliency of many multi-robot algorithms. Because our results are finite time and not asymptotic, they are particularly well-suited for problems with a time critical nature. We develop two algorithms, \emph{FindSpoofedRobots} that determines trusted neighbors with high probability, and \emph{FindResilientAdjacencyMatrix} that enables distributed computation of graph properties in an adversarial setting. We apply our methods to a flocking problem where a team of robots must track a moving target in the presence of adversarial robots. We show that by using our algorithms, the team of robots are able to maintain tracking ability of the dynamic target.