 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Distributed Optimization over Directed Graphs under Malicious Attacks using Trust
Jul 09, 2024

In this work, we introduce the Resilient Projected Push-Pull (RP3) algorithm designed for distributed optimization in multi-agent cyber-physical systems with directed communication graphs and the presence of malicious agents. Our algorithm leverages stochastic inter-agent trust values and gradient tracking to achieve geometric convergence rates in expectation even in adversarial environments. We introduce growing constraint sets to limit the impact of the malicious agents without compromising the geometric convergence rate of the algorithm. We prove that RP3 converges to the nominal optimal solution almost surely and in the $r$-th mean for any $r\geq 1$, provided the step sizes are sufficiently small and the constraint sets are appropriately chosen. We validate our approach with numerical studies on average consensus and multi-robot target tracking problems, demonstrating that RP3 effectively mitigates the impact of malicious agents and achieves the desired geometric convergence.
Tiny Reinforcement Learning for Quadruped Locomotion using Decision Transformers
Feb 20, 2024Resource-constrained robotic platforms are particularly useful for tasks that require low-cost hardware alternatives due to the risk of losing the robot, like in search-and-rescue applications, or the need for a large number of devices, like in swarm robotics. For this reason, it is crucial to find mechanisms for adapting reinforcement learning techniques to the constraints imposed by lower computational power and smaller memory capacities of these ultra low-cost robotic platforms. We try to address this need by proposing a method for making imitation learning deployable onto resource-constrained robotic platforms. Here we cast the imitation learning problem as a conditional sequence modeling task and we train a decision transformer using expert demonstrations augmented with a custom reward. Then, we compress the resulting generative model using software optimization schemes, including quantization and pruning. We test our method in simulation using Isaac Gym, a realistic physics simulation environment designed for reinforcement learning. We empirically demonstrate that our method achieves natural looking gaits for Bittle, a resource-constrained quadruped robot. We also run multiple simulations to show the effects of pruning and quantization on the performance of the model. Our results show that quantization (down to 4 bits) and pruning reduce model size by around 30\% while maintaining a competitive reward, making the model deployable in a resource-constrained system.
Exploiting Trust for Resilient Hypothesis Testing with Malicious Robots (evolved version)
Mar 07, 2023



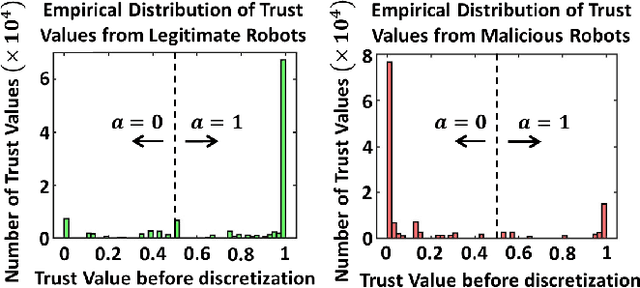
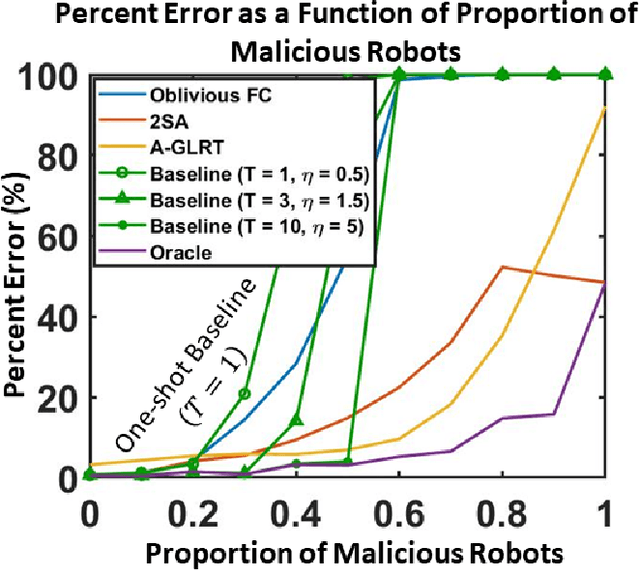
We develop a resilient binary hypothesis testing framework for decision making in adversarial multi-robot crowdsensing tasks. This framework exploits stochastic trust observations between robots to arrive at tractable, resilient decision making at a centralized Fusion Center (FC) even when i) there exist malicious robots in the network and their number may be larger than the number of legitimate robots, and ii) the FC uses one-shot noisy measurements from all robots. We derive two algorithms to achieve this. The first is the Two Stage Approach (2SA) that estimates the legitimacy of robots based on received trust observations, and provably minimizes the probability of detection error in the worst-case malicious attack. Here, the proportion of malicious robots is known but arbitrary. For the case of an unknown proportion of malicious robots, we develop the Adversarial Generalized Likelihood Ratio Test (A-GLRT) that uses both the reported robot measurements and trust observations to estimate the trustworthiness of robots, their reporting strategy, and the correct hypothesis simultaneously. We exploit special problem structure to show that this approach remains computationally tractable despite several unknown problem parameters. We deploy both algorithms in a hardware experiment where a group of robots conducts crowdsensing of traffic conditions on a mock-up road network similar in spirit to Google Maps, subject to a Sybil attack. We extract the trust observations for each robot from actual communication signals which provide statistical information on the uniqueness of the sender. We show that even when the malicious robots are in the majority, the FC can reduce the probability of detection error to 30.5% and 29% for the 2SA and the A-GLRT respectively.
Exploiting Trust for Resilient Hypothesis Testing with Malicious Robots
Sep 25, 2022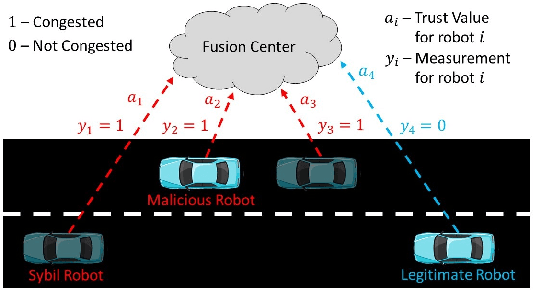

We develop a resilient binary hypothesis testing framework for decision making in adversarial multi-robot crowdsensing tasks. This framework exploits stochastic trust observations between robots to arrive at tractable, resilient decision making at a centralized Fusion Center (FC) even when i) there exist malicious robots in the network and their number may be larger than the number of legitimate robots, and ii) the FC uses one-shot noisy measurements from all robots. We derive two algorithms to achieve this. The first is the Two Stage Approach (2SA) that estimates the legitimacy of robots based on received trust observations, and provably minimizes the probability of detection error in the worst-case malicious attack. Here, the proportion of malicious robots is known but arbitrary. For the case of an unknown proportion of malicious robots, we develop the Adversarial Generalized Likelihood Ratio Test (A-GLRT) that uses both the reported robot measurements and trust observations to estimate the trustworthiness of robots, their reporting strategy, and the correct hypothesis simultaneously. We exploit special problem structure to show that this approach remains computationally tractable despite several unknown problem parameters. We deploy both algorithms in a hardware experiment where a group of robots conducts crowdsensing of traffic conditions on a mock-up road network similar in spirit to Google Maps, subject to a Sybil attack. We extract the trust observations for each robot from actual communication signals which provide statistical information on the uniqueness of the sender. We show that even when the malicious robots are in the majority, the FC can reduce the probability of detection error to 30.5% and 29% for the 2SA and the A-GLRT respectively.