 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistance-Aware Muon: Adaptive Step Scaling for Normalized Optimization
May 18, 2026Muon and related normalized optimizers decouple the choice of update direction from the choice of step scale, but their practical performance remains sensitive to the scale of the normalized step. We study adaptive scaling rules for Muon in general norm geometries and develop three complementary algorithms. For smooth non-convex objectives, we introduce Distance-Adaptive Muon, whose trust-region radius is set from the radius explored by the trajectory, and prove a stationarity guarantee under a bounded-trajectory assumption. We then turn to star-convex objectives, a tractable model of the favorable global geometry often used to reason about the empirical loss landscapes of deep neural networks, where objective-gap guarantees are possible. In this setting, we first introduce Scale-Calibrated Muon, which keeps Muon's exponential moving average but sets the step length from a local descent certificate computed from the current gradient and momentum. For this method, we prove a last-iterate O(1/T) objective-gap bound under a bounded initial sublevel-set assumption, where the corresponding radius parameter appears only in the analysis and not in the algorithm. Finally, we develop Distance-Free Muon, a recentered trust-region method that uses a scalar distance certificate and a majorized one-dimensional search to select the trust-region radius without requiring the unknown distance from the initialization to a global minimizer. Experiments on Transformer language modeling (GPT-124M/WikiText-103) and image classification (ViT-Tiny/CIFAR-100) show that the proposed adaptive scaling rules reduce sensitivity to manual scale tuning and match or improve tuned fixed-scale Muon baselines under the tested budgets.
Randomized Feasibility Methods for Constrained Optimization with Adaptive Step Sizes
Jan 27, 2026We consider minimizing an objective function subject to constraints defined by the intersection of lower-level sets of convex functions. We study two cases: (i) strongly convex and Lipschitz-smooth objective function and (ii) convex but possibly nonsmooth objective function. To deal with the constraints that are not easy to project on, we use a randomized feasibility algorithm with Polyak steps and a random number of sampled constraints per iteration, while taking (sub)gradient steps to minimize the objective function. For case (i), we prove linear convergence in expectation of the objective function values to any prescribed tolerance using an adaptive stepsize. For case (ii), we develop a fully problem parameter-free and adaptive stepsize scheme that yields an $O(1/\sqrt{T})$ worst-case rate in expectation. The infeasibility of the iterates decreases geometrically with the number of feasibility updates almost surely, while for the averaged iterates, we establish an expected lower bound on the function values relative to the optimal value that depends on the distribution for the random number of sampled constraints. For certain choices of sample-size growth, optimal rates are achieved. Finally, simulations on a Quadratically Constrained Quadratic Programming (QCQP) problem and Support Vector Machines (SVM) demonstrate the computational efficiency of our algorithm compared to other state-of-the-art methods.
Fast Distributed Optimization over Directed Graphs under Malicious Attacks using Trust
Jul 09, 2024

In this work, we introduce the Resilient Projected Push-Pull (RP3) algorithm designed for distributed optimization in multi-agent cyber-physical systems with directed communication graphs and the presence of malicious agents. Our algorithm leverages stochastic inter-agent trust values and gradient tracking to achieve geometric convergence rates in expectation even in adversarial environments. We introduce growing constraint sets to limit the impact of the malicious agents without compromising the geometric convergence rate of the algorithm. We prove that RP3 converges to the nominal optimal solution almost surely and in the $r$-th mean for any $r\geq 1$, provided the step sizes are sufficiently small and the constraint sets are appropriately chosen. We validate our approach with numerical studies on average consensus and multi-robot target tracking problems, demonstrating that RP3 effectively mitigates the impact of malicious agents and achieves the desired geometric convergence.
How Physicality Enables Trust: A New Era of Trust-Centered Cyberphysical Systems
Nov 13, 2023



Multi-agent cyberphysical systems enable new capabilities in efficiency, resilience, and security. The unique characteristics of these systems prompt a reevaluation of their security concepts, including their vulnerabilities, and mechanisms to mitigate these vulnerabilities. This survey paper examines how advancement in wireless networking, coupled with the sensing and computing in cyberphysical systems, can foster novel security capabilities. This study delves into three main themes related to securing multi-agent cyberphysical systems. First, we discuss the threats that are particularly relevant to multi-agent cyberphysical systems given the potential lack of trust between agents. Second, we present prospects for sensing, contextual awareness, and authentication, enabling the inference and measurement of ``inter-agent trust" for these systems. Third, we elaborate on the application of quantifiable trust notions to enable ``resilient coordination," where ``resilient" signifies sustained functionality amid attacks on multiagent cyberphysical systems. We refer to the capability of cyberphysical systems to self-organize, and coordinate to achieve a task as autonomy. This survey unveils the cyberphysical character of future interconnected systems as a pivotal catalyst for realizing robust, trust-centered autonomy in tomorrow's world.
Resilient Distributed Optimization for Multi-Agent Cyberphysical Systems
Dec 05, 2022Enhancing resilience in distributed networks in the face of malicious agents is an important problem for which many key theoretical results and applications require further development and characterization. This work focuses on the problem of distributed optimization in multi-agent cyberphysical systems, where a legitimate agent's dynamic is influenced both by the values it receives from potentially malicious neighboring agents, and by its own self-serving target function. We develop a new algorithmic and analytical framework to achieve resilience for the class of problems where stochastic values of trust between agents exist and can be exploited. In this case we show that convergence to the true global optimal point can be recovered, both in mean and almost surely, even in the presence of malicious agents. Furthermore, we provide expected convergence rate guarantees in the form of upper bounds on the expected squared distance to the optimal value. Finally, we present numerical results that validate the analytical convergence guarantees we present in this paper even when the malicious agents compose the majority of agents in the network.
Characterizing Trust and Resilience in Distributed Consensus for Cyberphysical Systems
Mar 09, 2021



This work considers the problem of resilient consensus where stochastic values of trust between agents are available. Specifically, we derive a unified mathematical framework to characterize convergence, deviation of the consensus from the true consensus value, and expected convergence rate, when there exists additional information of trust between agents. We show that under certain conditions on the stochastic trust values and consensus protocol: 1) almost sure convergence to a common limit value is possible even when malicious agents constitute more than half of the network connectivity, 2) the deviation of the converged limit, from the case where there is no attack, i.e., the true consensus value, can be bounded with probability that approaches 1 exponentially, and 3) correct classification of malicious and legitimate agents can be attained in finite time almost surely. Further, the expected convergence rate decays exponentially with the quality of the trust observations between agents.
A general framework for decentralized optimization with first-order methods
Sep 12, 2020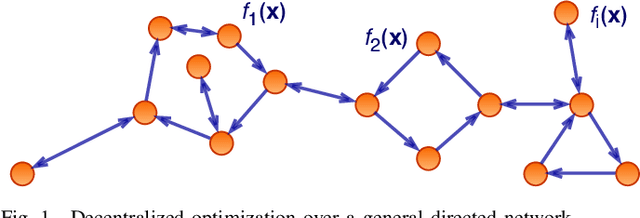
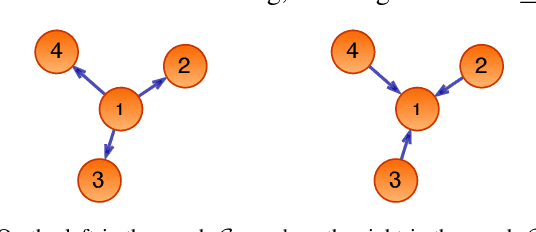
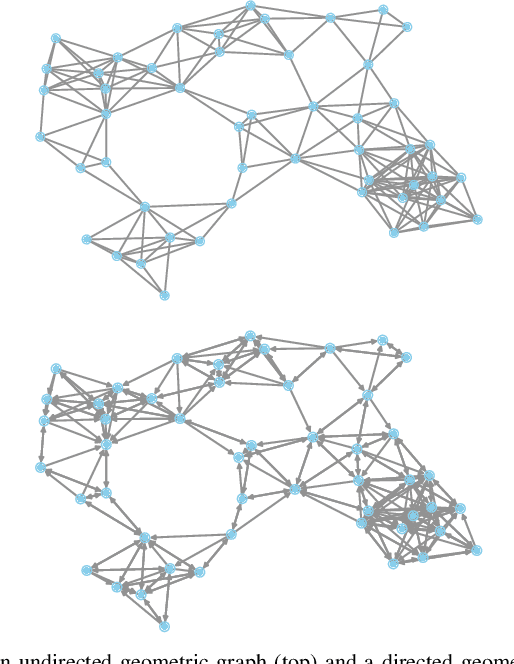
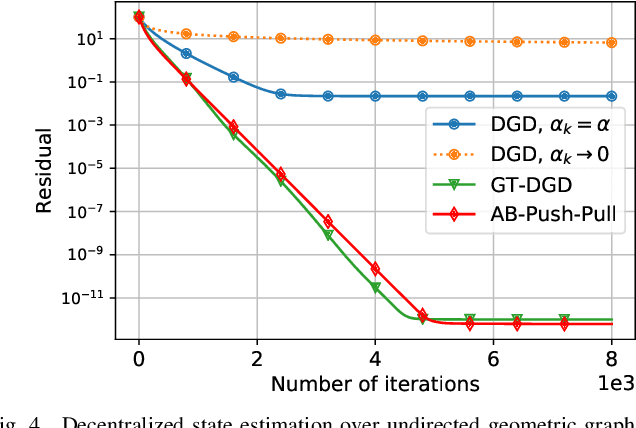
Decentralized optimization to minimize a finite sum of functions over a network of nodes has been a significant focus within control and signal processing research due to its natural relevance to optimal control and signal estimation problems. More recently, the emergence of sophisticated computing and large-scale data science needs have led to a resurgence of activity in this area. In this article, we discuss decentralized first-order gradient methods, which have found tremendous success in control, signal processing, and machine learning problems, where such methods, due to their simplicity, serve as the first method of choice for many complex inference and training tasks. In particular, we provide a general framework of decentralized first-order methods that is applicable to undirected and directed communication networks alike, and show that much of the existing work on optimization and consensus can be related explicitly to this framework. We further extend the discussion to decentralized stochastic first-order methods that rely on stochastic gradients at each node and describe how local variance reduction schemes, previously shown to have promise in the centralized settings, are able to improve the performance of decentralized methods when combined with what is known as gradient tracking. We motivate and demonstrate the effectiveness of the corresponding methods in the context of machine learning and signal processing problems that arise in decentralized environments.
On the Sample Complexity and Optimization Landscape for Quadratic Feasibility Problems
Feb 04, 2020We consider the problem of recovering a complex vector $\mathbf{x}\in \mathbb{C}^n$ from $m$ quadratic measurements $\{\langle A_i\mathbf{x}, \mathbf{x}\rangle\}_{i=1}^m$. This problem, known as quadratic feasibility, encompasses the well known phase retrieval problem and has applications in a wide range of important areas including power system state estimation and x-ray crystallography. In general, not only is the the quadratic feasibility problem NP-hard to solve, but it may in fact be unidentifiable. In this paper, we establish conditions under which this problem becomes {identifiable}, and further prove isometry properties in the case when the matrices $\{A_i\}_{i=1}^m$ are Hermitian matrices sampled from a complex Gaussian distribution. Moreover, we explore a nonconvex {optimization} formulation of this problem, and establish salient features of the associated optimization landscape that enables gradient algorithms with an arbitrary initialization to converge to a \emph{globally optimal} point with a high probability. Our results also reveal sample complexity requirements for successfully identifying a feasible solution in these contexts.
Distributed Computation of Wasserstein Barycenters over Networks
Sep 20, 2018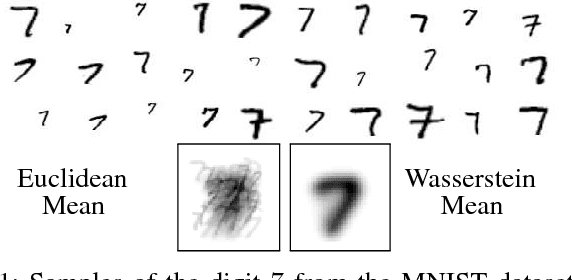
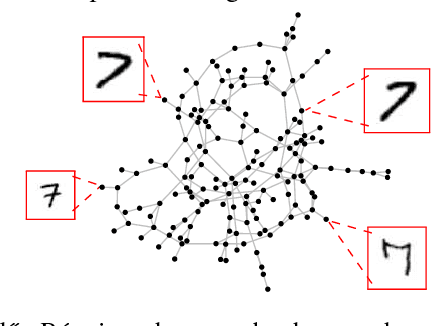
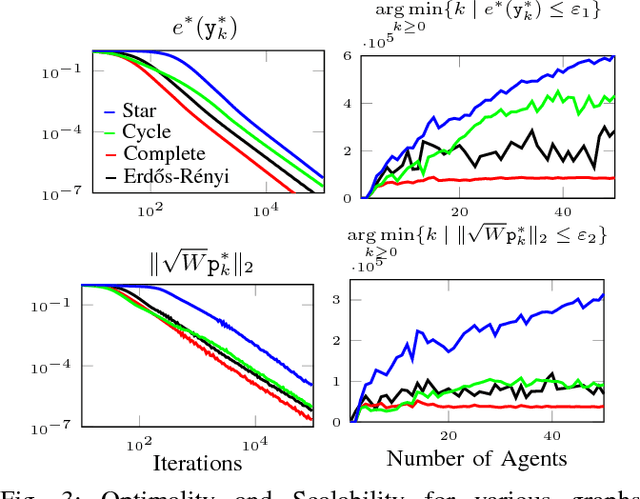
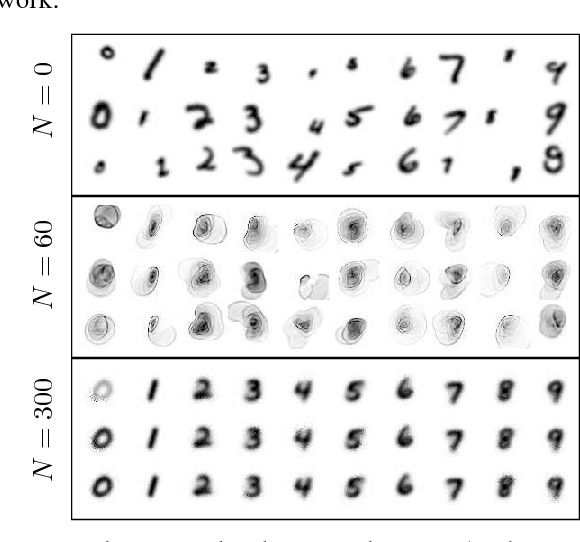
We propose a new \cu{class-optimal} algorithm for the distributed computation of Wasserstein Barycenters over networks. Assuming that each node in a graph has a probability distribution, we prove that every node can reach the barycenter of all distributions held in the network by using local interactions compliant with the topology of the graph. We provide an estimate for the minimum number of communication rounds required for the proposed method to achieve arbitrary relative precision both in the optimality of the solution and the consensus among all agents for undirected fixed networks.
Distributed Stochastic Gradient Tracking Methods
Sep 08, 2018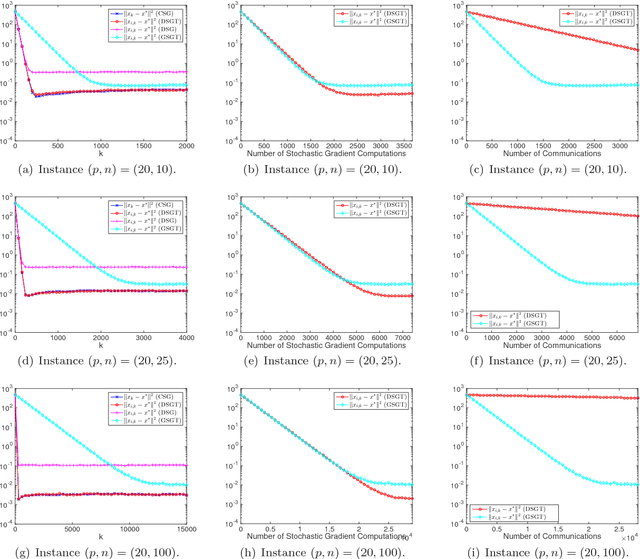
In this paper, we study the problem of distributed multi-agent optimization over a network, where each agent possesses a local cost function that is smooth and strongly convex. The global objective is to find a common solution that minimizes the average of all cost functions. Assuming agents only have access to unbiased estimates of the gradients of their local cost functions, we consider a distributed stochastic gradient tracking method (DSGT) and a gossip-like stochastic gradient tracking method (GSGT). We show that, in expectation, the iterates generated by each agent are attracted to a neighborhood of the optimal solution, where they accumulate exponentially fast (under a constant stepsize choice). Under DSGT, the limiting (expected) error bounds on the distance of the iterates from the optimal solution decrease with the network size $n$, which is a comparable performance to a centralized stochastic gradient algorithm. Moreover, we show that when the network is well-connected, GSGT incurs lower communication cost than DSGT while maintaining a similar computational cost. Numerical example further demonstrates the effectiveness of the proposed methods.