 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient State Estimation with Constrained Rao-Blackwellized Particle Filter
Oct 07, 2023Due to the limitations of the robotic sensors, during a robotic manipulation task, the acquisition of the object's state can be unreliable and noisy. Combining an accurate model of multi-body dynamic system with Bayesian filtering methods has been shown to be able to filter out noise from the object's observed states. However, efficiency of these filtering methods suffers from samples that violate the physical constraints, e.g., no penetration constraint. In this paper, we propose a Rao-Blackwellized Particle Filter (RBPF) that samples the contact states and updates the object's poses using Kalman filters. This RBPF also enforces the physical constraints on the samples by solving a quadratic programming problem. By comparing our method with methods that does not consider physical constraints, we show that our proposed RBPF is not only able to estimate the object's states, e.g., poses, more accurately but also able to infer unobserved states, e.g., velocities, with higher precision.
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
BubbleTouch: A Quasi-Static Tactile Skin Simulator
Sep 24, 2018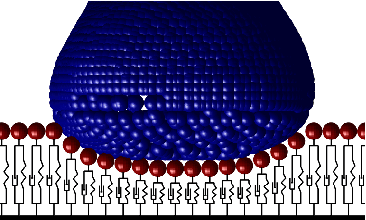

We present BubbleTouch, an open source quasi-static simulator for robotic tactile skins. BubbleTouch can be used to simulate contact with a robot's tactile skin patches as it interacts with humans and objects. The simulator creates detailed traces of contact forces that can be used in experiments in tactile contact activities. We summarize the design of BubbleTouch and highlight our recent work that uses BubbleTouch for experiments with tactile object recognition.
Compressed Sensing for Scalable Robotic Tactile Skins
May 12, 2017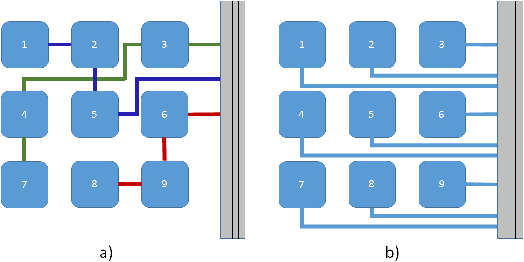
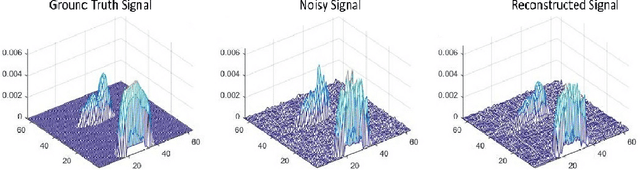
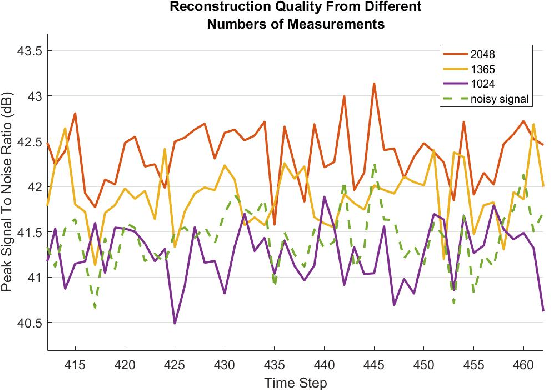
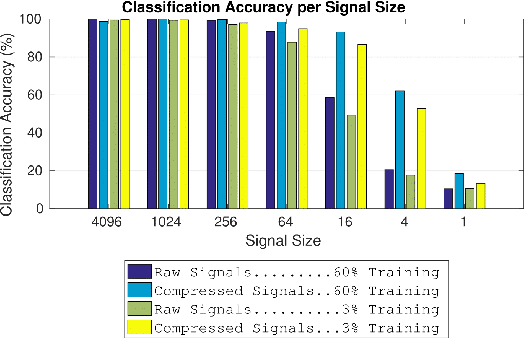
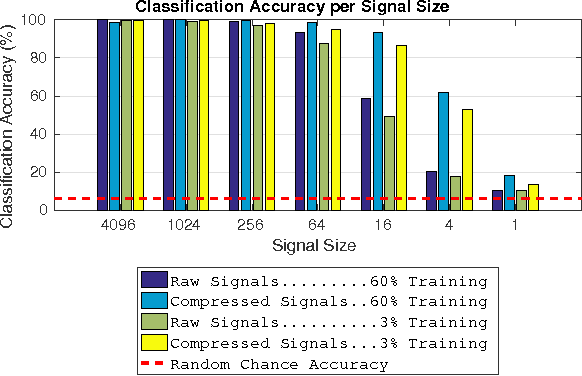
The potential of large tactile arrays to improve robot perception for safe operation in human-dominated environments and of high-resolution tactile arrays to enable human-level dexterous manipulation is well accepted. However, the increase in the number of tactile sensing elements introduces challenges including wiring complexity, data acquisition, and data processing. To help address these challenges, we develop a tactile sensing technique based on compressed sensing. Compressed sensing simultaneously performs data sampling and compression with recovery guarantees and has been successfully applied in computer vision. We use compressed sensing techniques for tactile data acquisition to reduce hardware complexity and data transmission, while allowing fast, accurate reconstruction of the full-resolution signal. For our simulated test array of 4096 taxels, we achieve reconstruction quality equivalent to measuring all taxel signals independently (the full signal) from just 1024 measurements (the compressed signal) at a rate over 100Hz. We then apply tactile compressed sensing to the problem of object classification. Specifically, we perform object classification on the compressed tactile data based on a method called compressed learning. We obtain up to 98% classification accuracy, even with a compression ratio of 64:1.
Compressed Learning for Tactile Object Classification
Sep 24, 2016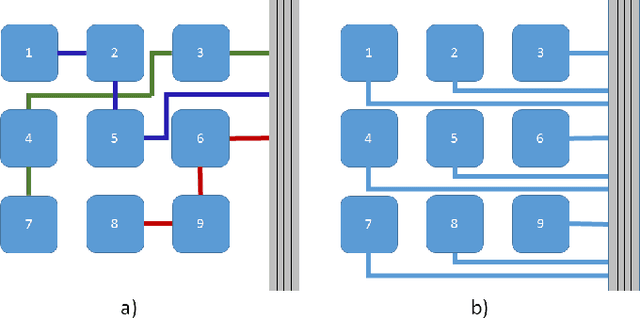
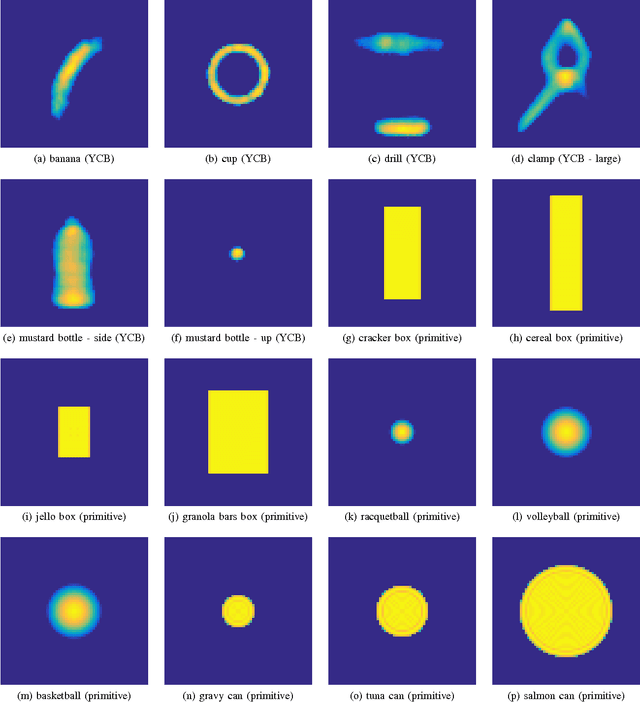
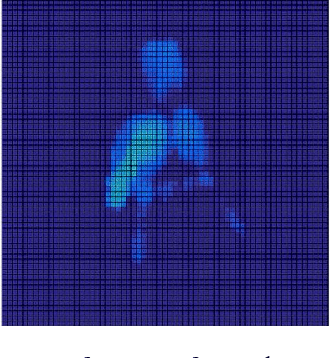
The potential of large tactile arrays to improve robot perception for safe operation in human-dominated environments and of high-resolution tactile arrays to enable human-level dexterous manipulation is well accepted. However, the increase in the number of tactile sensing elements introduces challenges including wiring complexity, power consumption, and data processing. To help address these challenges, we previously developed a tactile sensing technique based compressed sensing that reduces hardware complexity and data transmission, while allowing accurate reconstruction of the full-resolution signal. In this paper, we apply tactile compressed sensing to the problem of object classification. Specifically, we perform object classification on the compressed tactile data. We evaluate our method using BubbleTouch, our tactile array simulator. Our results show our approach achieves high classification accuracy, even with compression factors up to 64.
Compressed Sensing for Tactile Skins
Mar 04, 2016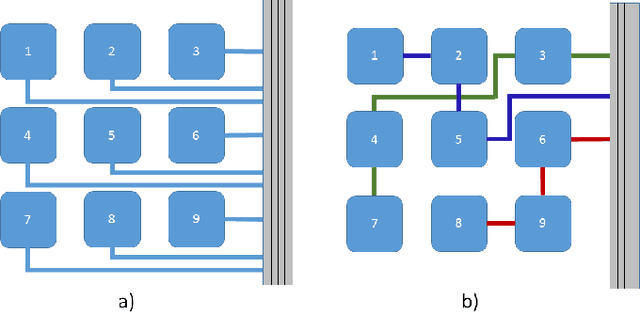

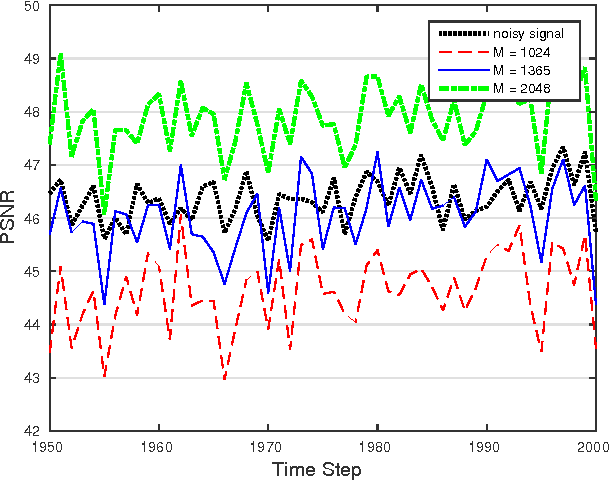
Whole body tactile perception via tactile skins offers large benefits for robots in unstructured environments. To fully realize this benefit, tactile systems must support real-time data acquisition over a massive number of tactile sensor elements. We present a novel approach for scalable tactile data acquisition using compressed sensing. We first demonstrate that the tactile data is amenable to compressed sensing techniques. We then develop a solution for fast data sampling, compression, and reconstruction that is suited for tactile system hardware and has potential for reducing the wiring complexity. Finally, we evaluate the performance of our technique on simulated tactile sensor networks. Our evaluations show that compressed sensing, with a compression ratio of 3 to 1, can achieve higher signal acquisition accuracy than full data acquisition of noisy sensor data.