 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressed Sensing for Tactile Skins
Paper and Code
Mar 04, 2016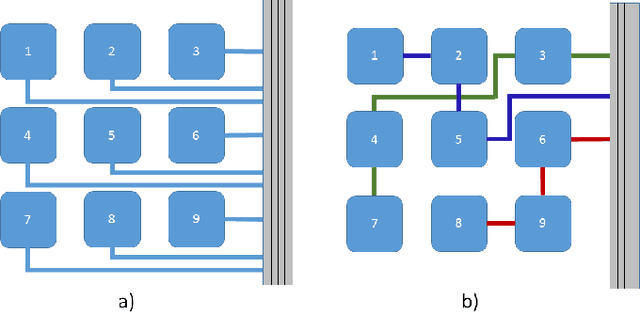

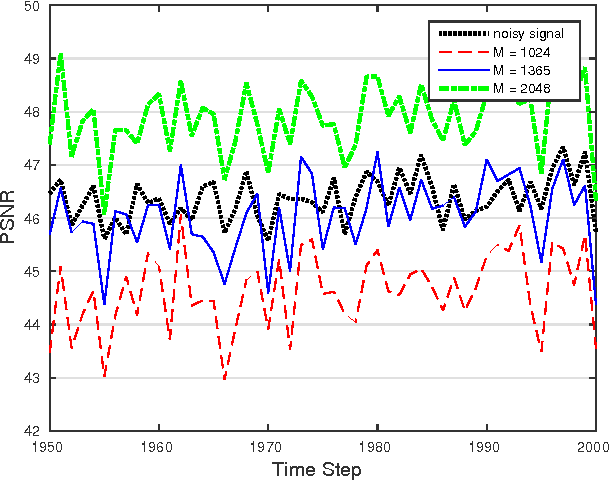
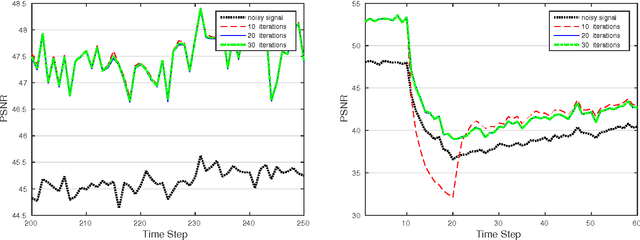
Whole body tactile perception via tactile skins offers large benefits for robots in unstructured environments. To fully realize this benefit, tactile systems must support real-time data acquisition over a massive number of tactile sensor elements. We present a novel approach for scalable tactile data acquisition using compressed sensing. We first demonstrate that the tactile data is amenable to compressed sensing techniques. We then develop a solution for fast data sampling, compression, and reconstruction that is suited for tactile system hardware and has potential for reducing the wiring complexity. Finally, we evaluate the performance of our technique on simulated tactile sensor networks. Our evaluations show that compressed sensing, with a compression ratio of 3 to 1, can achieve higher signal acquisition accuracy than full data acquisition of noisy sensor data.