Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBubbleTouch: A Quasi-Static Tactile Skin Simulator
Paper and Code
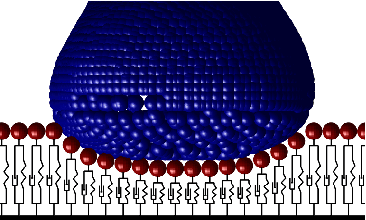
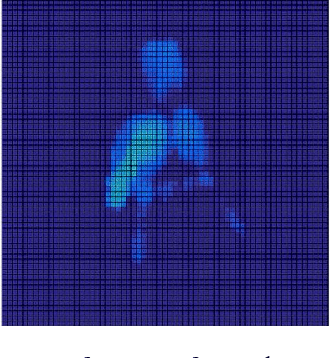

We present BubbleTouch, an open source quasi-static simulator for robotic tactile skins. BubbleTouch can be used to simulate contact with a robot's tactile skin patches as it interacts with humans and objects. The simulator creates detailed traces of contact forces that can be used in experiments in tactile contact activities. We summarize the design of BubbleTouch and highlight our recent work that uses BubbleTouch for experiments with tactile object recognition.
* Presented at AI-HRI AAAI-FSS, 2018 (arXiv:1809.06606)
View paper on