 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectrostatics-Inspired Surface Reconstruction (EISR): Recovering 3D Shapes as a Superposition of Poisson's PDE Solutions
Feb 12, 2026Implicit shape representation, such as SDFs, is a popular approach to recover the surface of a 3D shape as the level sets of a scalar field. Several methods approximate SDFs using machine learning strategies that exploit the knowledge that SDFs are solutions of the Eikonal partial differential equation (PDEs). In this work, we present a novel approach to surface reconstruction by encoding it as a solution to a proxy PDE, namely Poisson's equation. Then, we explore the connection between Poisson's equation and physics, e.g., the electrostatic potential due to a positive charge density. We employ Green's functions to obtain a closed-form parametric expression for the PDE's solution, and leverage the linearity of our proxy PDE to find the target shape's implicit field as a superposition of solutions. Our method shows improved results in approximating high-frequency details, even with a small number of shape priors.
Learning to Navigate in Turbulent Flows with Aerial Robot Swarms: A Cooperative Deep Reinforcement Learning Approach
Jun 07, 2023Aerial operation in turbulent environments is a challenging problem due to the chaotic behavior of the flow. This problem is made even more complex when a team of aerial robots is trying to achieve coordinated motion in turbulent wind conditions. In this paper, we present a novel multi-robot controller to navigate in turbulent flows, decoupling the trajectory-tracking control from the turbulence compensation via a nested control architecture. Unlike previous works, our method does not learn to compensate for the air-flow at a specific time and space. Instead, our method learns to compensate for the flow based on its effect on the team. This is made possible via a deep reinforcement learning approach, implemented via a Graph Convolutional Neural Network (GCNN)-based architecture, which enables robots to achieve better wind compensation by processing the spatial-temporal correlation of wind flows across the team. Our approach scales well to large robot teams -- as each robot only uses information from its nearest neighbors -- , and generalizes well to robot teams larger than seen in training. Simulated experiments demonstrate how information sharing improves turbulence compensation in a team of aerial robots and demonstrate the flexibility of our method over different team configurations.
Cosine-Pruned Medial Axis: A new method for isometric equivariant and noise-free medial axis extraction
Dec 05, 2020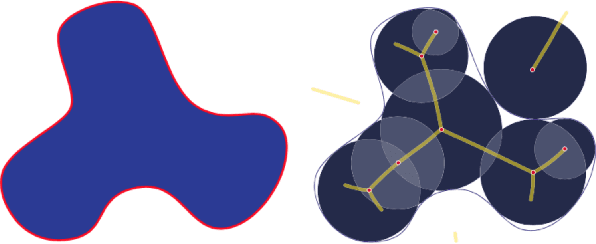
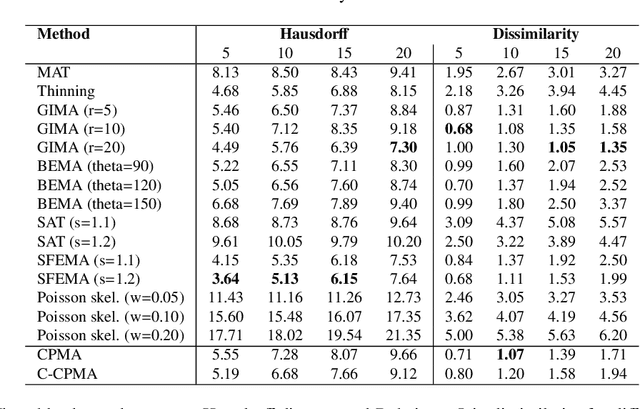
We present the CPMA, a new method for medial axis pruning with noise robustness and equivariance to isometric transformations. Our method leverages the discrete cosine transform to create smooth versions of a shape $\Omega$. We use the smooth shapes to compute a score function $\scorefunction$ that filters out spurious branches from the medial axis. We extensively compare the CPMA with state-of-the-art pruning methods and highlight our method's noise robustness and isometric equivariance. We found that our pruning approach achieves competitive results and yields stable medial axes even in scenarios with significant contour perturbations.
Automatic skin lesion segmentation on dermoscopic images by the means of superpixel merging
Aug 21, 2018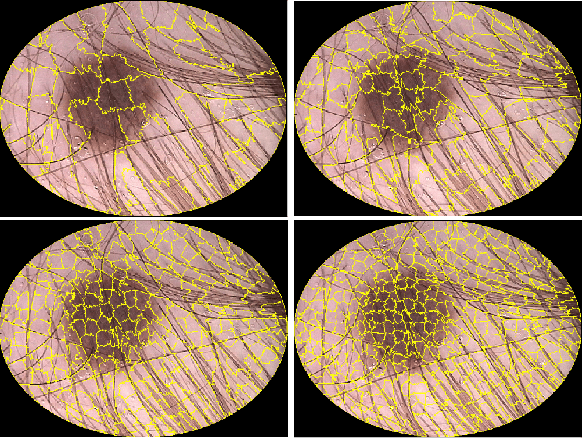
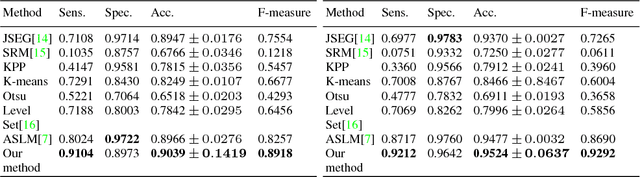
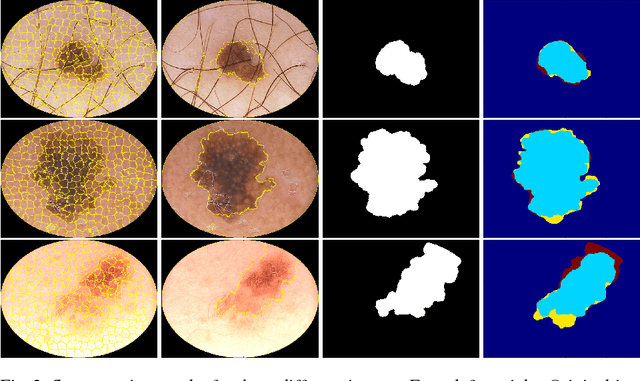
We present a superpixel-based strategy for segmenting skin lesion on dermoscopic images. The segmentation is carried out by over-segmenting the original image using the SLIC algorithm, and then merge the resulting superpixels into two regions: healthy skin and lesion. The mean RGB color of each superpixel was used as merging criterion. The presented method is capable of dealing with segmentation problems commonly found in dermoscopic images such as hair removal, oil bubbles, changes in illumination, and reflections images without any additional steps. The method was evaluated on the PH2 and ISIC 2017 dataset with results comparable to the state-of-art.