 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Synthesis of Reactive Collision-Free Whole-Body Robot Motions: A Complementarity-based Approach
Oct 29, 2024This paper is about generating motion plans for high degree-of-freedom systems that account for collisions along the entire body. A particular class of mathematical programs with complementarity constraints become useful in this regard. Optimization-based planners can tackle confined-space trajectory planning while being cognizant of robot constraints. However, introducing obstacles in this setting transforms the formulation into a non-convex problem (oftentimes with ill-posed bilinear constraints), which is non-trivial in a real-time setting. To this end, we present the FLIQC (Fast LInear Quadratic Complementarity based) motion planner. Our planner employs a novel motion model that captures the entire rigid robot as well as the obstacle geometry and ensures non-penetration between the surfaces due to the imposed constraint. We perform thorough comparative studies with the state-of-the-art, which demonstrate improved performance. Extensive simulation and hardware experiments validate our claim of generating continuous and reactive motion plans at 1 kHz for modern collaborative robots with constant minimal parameters.
LASMP: Language Aided Subset Sampling Based Motion Planner
Oct 01, 2024This paper presents the Language Aided Subset Sampling Based Motion Planner (LASMP), a system that helps mobile robots plan their movements by using natural language instructions. LASMP uses a modified version of the Rapidly Exploring Random Tree (RRT) method, which is guided by user-provided commands processed through a language model (RoBERTa). The system improves efficiency by focusing on specific areas of the robot's workspace based on these instructions, making it faster and less resource-intensive. Compared to traditional RRT methods, LASMP reduces the number of nodes needed by 55% and cuts random sample queries by 80%, while still generating safe, collision-free paths. Tested in both simulated and real-world environments, LASMP has shown better performance in handling complex indoor scenarios. The results highlight the potential of combining language processing with motion planning to make robot navigation more efficient.
Task Space Planning with Complementarity Constraint-based Obstacle Avoidance
Apr 16, 2021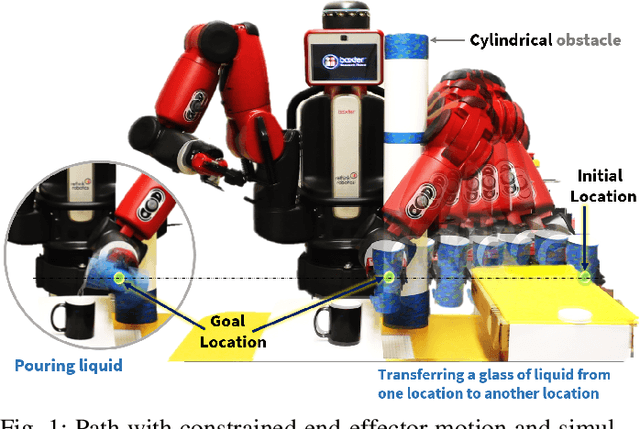
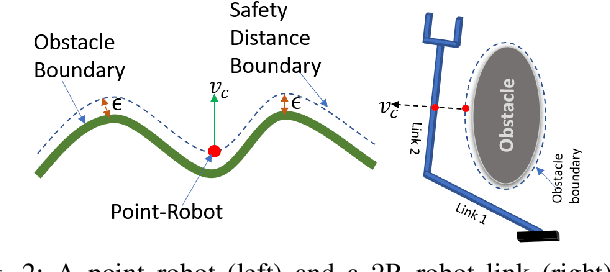
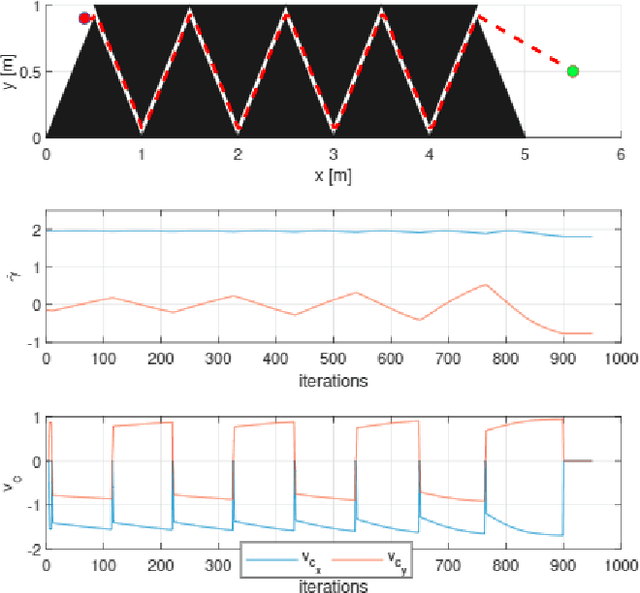

In this paper, we present a task space-based local motion planner that incorporates collision avoidance and constraints on end-effector motion during the execution of a task. Our key technical contribution is the development of a novel kinematic state evolution model of the robot where the collision avoidance is encoded as a complementarity constraint. We show that the kinematic state evolution with collision avoidance can be represented as a Linear Complementarity Problem (LCP). Using the LCP model along with Screw Linear Interpolation (ScLERP) in SE(3), we show that it may be possible to compute a path between two given task space poses by directly moving from the start to the goal pose, even if there are potential collisions with obstacles. The scalability of the planner is demonstrated with experiments using a physical robot. We present simulation and experimental results with both collision avoidance and task constraints to show the efficacy of our approach.
Robust Relative Hand Placement For Bi-Manual Tasks
Jun 25, 2020



In many bi-manual robotic tasks, like peg-in-a-hole assembly, the success of the task execution depends on the error in achieving the desired relative pose between the peg and the hole in a pre-insertion configuration. Random actuation errors in the joint space usually prevent the two arms from reaching their desired task space poses, which in turn results in a random error in relative pose between the two hands. This random error varies from trial to trial, and thus depending on the tolerance between the peg and the hole, the outcome of the assembly task may be random (sometimes the task execution succeeds and sometimes it fails). In general, since the relative pose has $6$ degrees-of-freedom, there are infinite numbers of joint space solutions for the two arms that correspond to the same task space relative pose. However, in the presence of actuation errors, the joint space solutions are not all identical since they map the joint space error sets differently to the task space. Thus, the goal of this paper is to develop a methodical approach to compute a joint space solution such that the maximum task space error is below a (specified) threshold with high probability. Such a solution is called a robust inverse kinematics solution for the bi-manual robot. Our proposed method also allows the robot to self-evaluate whether it can perform a given bi-manual task reliably. We use a square peg-in-a-hole assembly scenario on the dual-arm Baxter robot for numerical simulations that shows the utility of our approach.
Computing Robust Inverse Kinematics Under Uncertainty
Oct 24, 2019


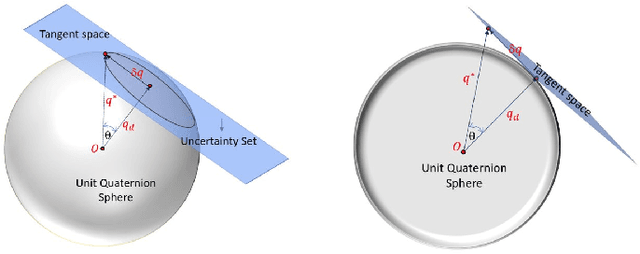
Robotic tasks, like reaching a pre-grasp configuration, are specified in the end effector space or task space, whereas, robot motion is controlled in joint space. Because of inherent actuation errors in joint space, robots cannot achieve desired configurations in task space exactly. Furthermore, different inverse kinematics (IK) solutions map joint space error set to task space differently. Thus for a given task with a prescribed error tolerance, all IK solutions will not be guaranteed to successfully execute the task. Any IK solution that is guaranteed to execute a task (possibly with high probability) irrespective of the realization of the joint space error is called a robust IK solution. In this paper we formulate and solve the robust inverse kinematics problem for redundant manipulators with actuation uncertainties (errors). We also present simulation and experimental results on a $7$-DoF redundant manipulator for two applications, namely, a pre-grasp positioning and a pre-insertion positioning scenario. Our results show that the robust IK solutions result in higher success rates and also allows the robot to self-evaluate how successful it might be in any application scenario.