 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
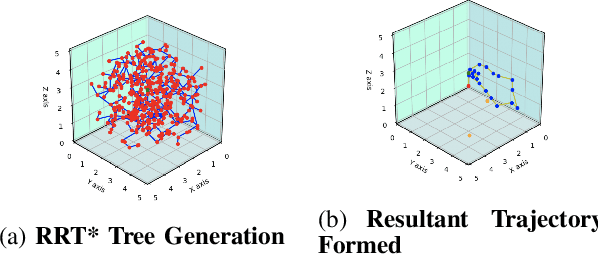
Add to EdgeLASMP: Language Aided Subset Sampling Based Motion Planner
Oct 01, 2024This paper presents the Language Aided Subset Sampling Based Motion Planner (LASMP), a system that helps mobile robots plan their movements by using natural language instructions. LASMP uses a modified version of the Rapidly Exploring Random Tree (RRT) method, which is guided by user-provided commands processed through a language model (RoBERTa). The system improves efficiency by focusing on specific areas of the robot's workspace based on these instructions, making it faster and less resource-intensive. Compared to traditional RRT methods, LASMP reduces the number of nodes needed by 55% and cuts random sample queries by 80%, while still generating safe, collision-free paths. Tested in both simulated and real-world environments, LASMP has shown better performance in handling complex indoor scenarios. The results highlight the potential of combining language processing with motion planning to make robot navigation more efficient.
Clustering and Analysis of Vulnerabilities Present in Different Robot Types
Aug 18, 2020
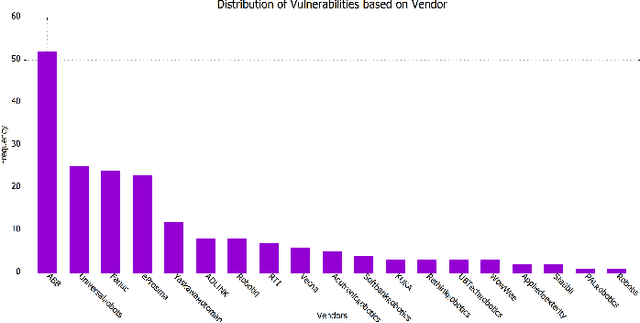
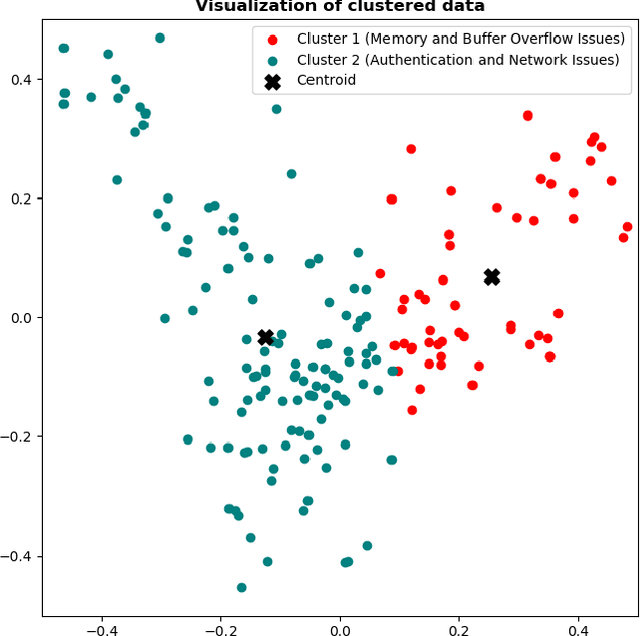

Due to the new advancements in automation using Artificial Intelligence, Robotics and Internet of Things it has become crucial to pay attention to possible vulnerabilities in order to avoid cyber attack and hijacking that can occur which can be catastrophic. There have been many consequences of disasters due to vulnerabilities in Robotics, these vulnerabilities need to be analyzed to target the severe ones before they cause cataclysm. This paper aims to highlight the areas and severity of each type of vulnerability by analyzing issues categorized under the type of vulnerability. This we achieve by careful analysis of the data and application of information retrieval techniques like Term Frequency - Inverse Document Frequency, dimension reduction techniques like Principal Component Analysis and Clustering using Machine Learning techniques like K-means. By performing this analysis, the severity of robotic issues in different domains and the severity of the issue based on type of issue is detected.
Predictive Probability Path Planning Model For Dynamic Environments
Jul 29, 2020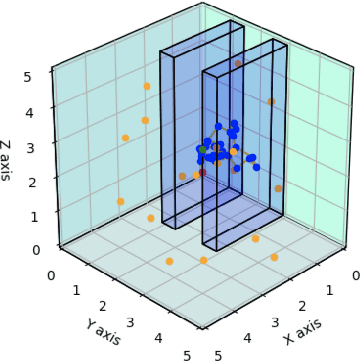
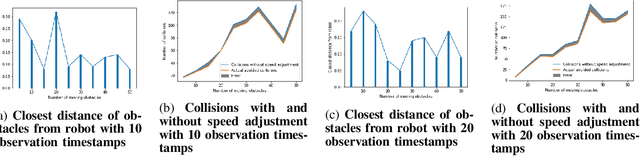
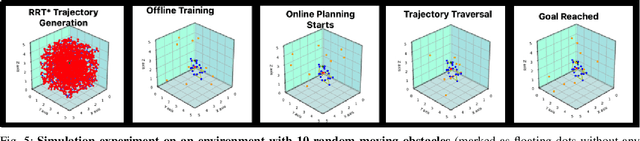
Path planning in dynamic environments is essential to high-risk applications such as unmanned aerial vehicles, self-driving cars, and autonomous underwater vehicles. In this paper, we generate collision-free trajectories for a robot within any given environment with temporal and spatial uncertainties caused due to randomly moving obstacles. We use two Poisson distributions to model the movements of obstacles across the generated trajectory of a robot in both space and time to determine the probability of collision with an obstacle. Measures are taken to avoid an obstacle by intelligently manipulating the speed of the robot at space-time intervals where a larger number of obstacles intersect the trajectory of the robot. Our method potentially reduces the use of computationally expensive collision detection libraries. Based on our experiments, there has been a significant improvement over existing methods in terms of safety, accuracy, execution time and computational cost. Our results show a high level of accuracy between the predicted and actual number of collisions with moving obstacles.
Predicting Sample Collision with Neural Networks
Jun 30, 2020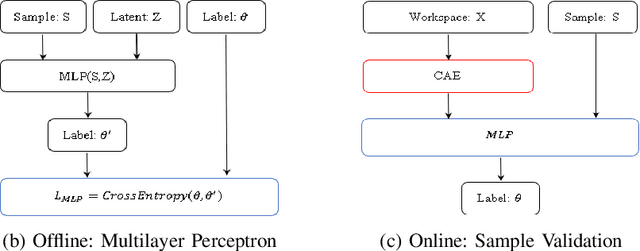
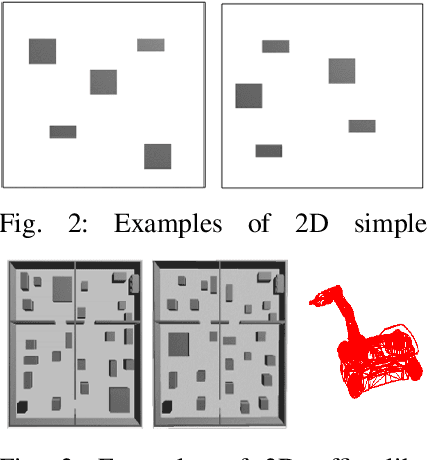
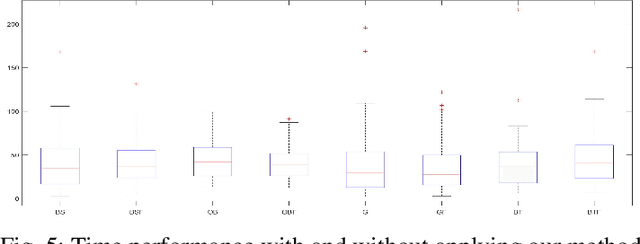
Many state-of-art robotics applications require fast and efficient motion planning algorithms. Existing motion planning methods become less effective as the dimensionality of the robot and its workspace increases, especially the computational cost of collision detection routines. In this work, we present a framework to address the cost of expensive primitive operations in sampling-based motion planning. This framework determines the validity of a sample robot configuration through a novel combination of a Contractive AutoEncoder (CAE), which captures a occupancy grids representation of the robot's workspace, and a Multilayer Perceptron, which efficiently predicts the collision state of the robot from the CAE and the robot's configuration. We evaluate our framework on multiple planning problems with a variety of robots in 2D and 3D workspaces. The results show that (1) the framework is computationally efficient in all investigated problems, and (2) the framework generalizes well to new workspaces.
Proceedings of the 1st International Workshop on Robot Learning and Planning
Oct 08, 2016

Proceedings of the 1st International Workshop on Robot Learning and Planning (RLP 2016)