 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the 1st International Workshop on Robot Learning and Planning
Oct 08, 2016

Proceedings of the 1st International Workshop on Robot Learning and Planning (RLP 2016)
NUROA: A Numerical Roadmap Algorithm
Jun 25, 2014
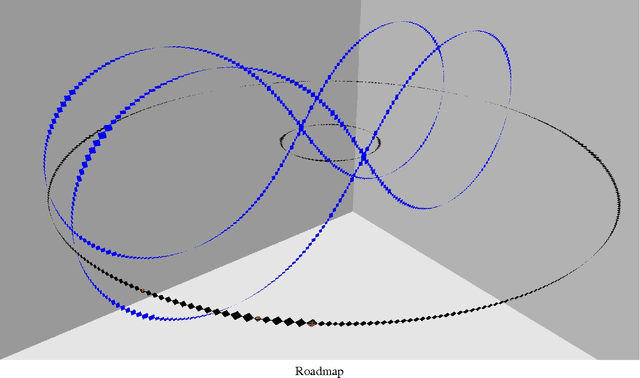

Motion planning has been studied for nearly four decades now. Complete, combinatorial motion planning approaches are theoretically well-rooted with completeness guarantees but they are hard to implement. Sampling-based and heuristic methods are easy to implement and quite simple to customize but they lack completeness guarantees. Can the best of both worlds be ever achieved, particularly for mission critical applications such as robotic surgery, space explorations, and handling hazardous material? In this paper, we answer affirmatively to that question. We present a new methodology, NUROA, to numerically approximate the Canny's roadmap, which is a network of one-dimensional algebraic curves. Our algorithm encloses the roadmap with a chain of tiny boxes each of which contains a piece of the roadmap and whose connectivity captures the roadmap connectivity. It starts by enclosing the entire space with a box. In each iteration, remaining boxes are shrunk on all sides and then split into smaller sized boxes. Those boxes that are empty are detected in the shrink phase and removed. The algorithm terminates when all remaining boxes are smaller than a resolution that can be either given as input or automatically computed using root separation lower bounds. Shrink operation is cast as a polynomial optimization with semialgebraic constraints, which is in turn transformed into a (series of) semidefinite programs (SDP) using the Lasserre's approach. NUROA's success is due to fast SDP solvers. NUROA correctly captured the connectivity of multiple curves/skeletons whereas competitors such as IBEX and Realpaver failed in some cases. Since boxes are independent from one another, NUROA can be parallelized particularly on GPUs. NUROA is available as an open source package at http://nuroa.sourceforge.net/.