 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRIS-Aided Kinematic Analysis for Remote Rehabilitation
Jun 30, 2023This paper is the first to introduce the idea of using reconfigurable intelligent surfaces (RISs) as passive devices that measure the position and orientation of certain human body parts over time. In this paper, we investigate the possibility of utilizing the available geometric information provided by on-body RISs that reflect signals from an off-body transmitter to an off-body receiver for stroke rehabilitation. More specifically, we investigate the possibility of using on-body RISs to estimate the location information over time of upper limbs that may have been impaired due to stroke. This location information can help medical professionals to estimate the possibly time varying pose and obtain progress on the rehabilitation of the upper limbs. Our analysis is focused on two scenarios: i) after assessment exercises for stroke rehabilitation when the upper limbs are resting at predefined points in the rehabilitation center, and ii) during the assessment exercises. In the first scenario, we explore the possibility of upper limb orientation estimation by deriving the Fisher information matrix (FIM) under near-field and far-field propagation conditions. It is noteworthy that the FIM quantifies how accurately we can estimate location information from a signal, and any subsequent algorithm is bounded by a function of the FIM. Coming to our propagation assumptions, the difference between the near-field and far-field regimes lies in the curvature of the wavefront. In the near-field, a receiver experiences a spherical wavefront, whereas in the far-field, the wavefront is approximately linear. The threshold to be within the near-field can be on the order of $10 \text{ m}.$
Task Space Planning with Complementarity Constraint-based Obstacle Avoidance
Apr 16, 2021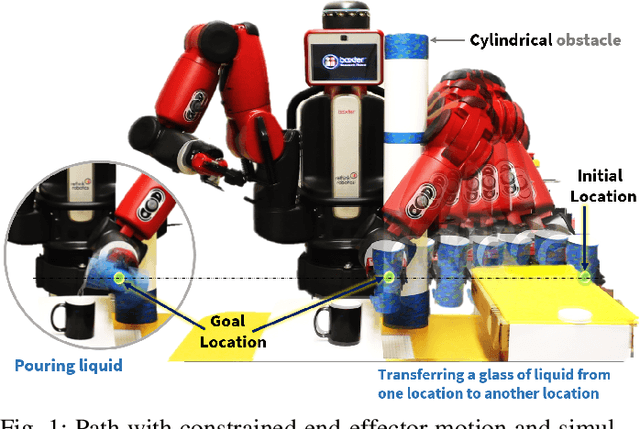
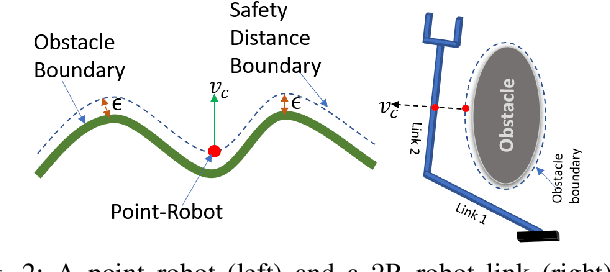
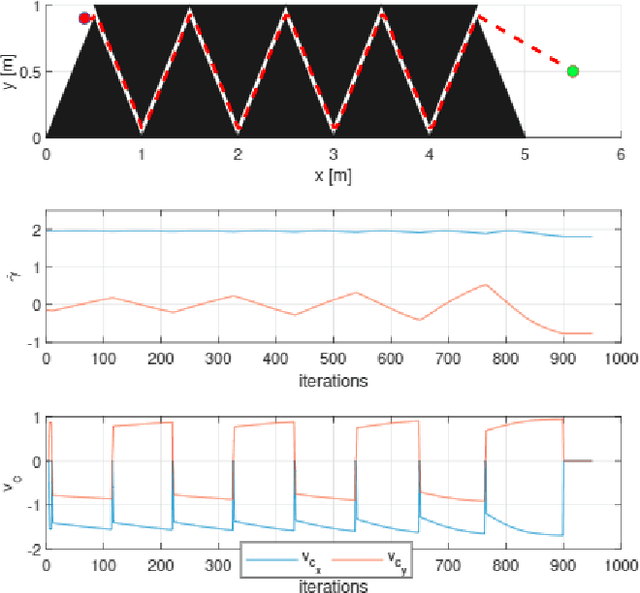

In this paper, we present a task space-based local motion planner that incorporates collision avoidance and constraints on end-effector motion during the execution of a task. Our key technical contribution is the development of a novel kinematic state evolution model of the robot where the collision avoidance is encoded as a complementarity constraint. We show that the kinematic state evolution with collision avoidance can be represented as a Linear Complementarity Problem (LCP). Using the LCP model along with Screw Linear Interpolation (ScLERP) in SE(3), we show that it may be possible to compute a path between two given task space poses by directly moving from the start to the goal pose, even if there are potential collisions with obstacles. The scalability of the planner is demonstrated with experiments using a physical robot. We present simulation and experimental results with both collision avoidance and task constraints to show the efficacy of our approach.