 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull Motion State Localization with Extra Large Aperture Arrays
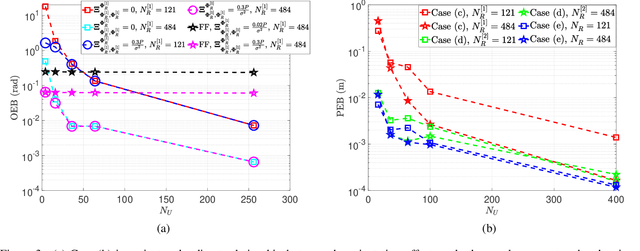
Mar 26, 2026Conventional localization techniques typically assume far-field (FF) propagation characterized by planar wavefronts and simplified spatial relationships. The use of higher carrier frequencies has given rise to the paradigm of extra large aperture arrays (ELAAs) which consist of a large number of tightly packed antenna elements. These arrays have a large electrical aperture which increases the Fraunhofer distance making the FF assumption restrictive. As a result, near-field (NF) effects, such as spherical wavefront curvature, direction dependent gains, and spatial variations in Doppler and delay, become significant even at distances previously regarded as FF. This paradigm shift opens up new opportunities: the rich multi-parametric structure of NF models if properly exploited can enable superior localization accuracy. In this work, we investigate the potential of multi-snapshot, full-motion state (3D position, 3D velocity, and 2D orientation) estimation using delay and Doppler measurements for a mobile receiver equipped with a linear ELAA in an environment comprising a number of wideband anchors. We develop a signal model that captures both the NF propagation geometry and spatially varying Doppler effects. We perform an information-theoretic analysis to establish Cramer-Rao lower bounds (CRLB) on the achievable position error bound (PEB), velocity error bound (VEB), and orientation error bound (OEB), respectively. We reveal that delay measurements carry richer information than Doppler measurements, and standalone Doppler measurements cannot overcome information losses due to unknown channel gains and frequency offsets, enabling only coarse estimation capabilities. We also propose a maximum-likelihood (ML) approach to jointly estimate the 8D position parameters from measured channel characteristics.
Age of Positioning with Stochastic Motion Models
Mar 11, 2025Age of Information (AoI) is a key metric used for evaluating data freshness in communication networks, particularly in systems requiring real-time updates. In positioning applications, maintaining low AoI is critical for ensuring timely and accurate position estimation. This paper introduces an age-informed metric, which we term as Age of Positioning (AoP), that captures the temporal evolution of positioning accuracy for agents following random trajectories and sharing sporadic location updates. Using the widely adopted Random Waypoint (RWP) mobility model, which captures stochastic user movement through waypoint-based trajectories, we derive closed-form expressions for this metric under various queuing disciplines and different modes of operation of the agent. The analytical results are verified with numerical simulations, and the existence of optimal operating conditions is demonstrated.
Geolocation with Large LEO Constellations: Insights from Fisher Information
Feb 10, 2025Interest in the use of the low earth orbit (LEO) in space - from $160 \text{ km}$ to $2000 \text{ km}$ - has skyrocketed; this is evident by the fact that National Aeronautics and Space Administration (NASA) has partnered with various commercial platforms like Axiom Space, Blue Origin, SpaceX, Sierra Space, Starlab Space, ThinkOrbital, and Vast Space to deploy satellites. %and platforms like Northrop Grumman and Boeing to transport cargo and crew. The most apparent advantage of satellites in LEO over satellites in Geostationary (GEO) and medium earth orbit (MEO) is their closeness to the earth; hence, signals from LEOs encounter lower propagation losses and reduced propagation delay, opening up the possibility of using these LEO satellites for localization. This article reviews the existing signal processing algorithms for localization using LEO satellites, introduces the basics of estimation theory, connects estimation theory to model identifiability with Fisher Information Matrix (FIM), and with the FIM, provides conditions that allow for $9$D localization of a terrestrial receiver using signals from multiple LEOs (unsynchronized in time and frequency) across multiple time slots and multiple receive antennas. We also compare the structure of the information available in LEO satellites with the structure of the information available in the Global Positioning System (GPS).
Impact of Model Mismatch on DOA Estimation with MUSIC: Near-Field and Far-Field
Feb 07, 2025There has been substantial work on developing variants of the multiple signal classification (MUSIC) algorithms that take advantage of the information present in the near-field propagation regime. However, it is not always easy to determine the correct propagation regime, which opens the possibility of incorrectly applying simpler algorithms (meant for far-field) in the near-field regime. Inspired by this, we use simulation results to investigate the performance drop when there is a mismatch between the signal model in the MUSIC algorithm and the propagation regime. For direction of arrival (DOA) estimation, we consider the cases when the receiver is in the near-field region but uses i) the near-field model, ii) the approximate near-field model (ANM) model, and iii) the far-field model to design the beamforming matrix in the MUSIC algorithm. We also consider the case when the receiver is in the far-field region, and we use the correct far-field model to design the beamforming matrix in the MUSIC algorithm. One contribution is that in the near-field, we have quantified the loss in performance when the ANM and the far-field model are used to create the beamforming matrix for the MUSIC algorithm, causing a reduction in estimation accuracy compared to the case when the correct near-field model is used to design the beamforming matrix. Another result is that in the near-field, when we incorrectly assume that the receiver is in the far-field and subsequently use the far-field beamforming matrix, we underestimate the DOA estimation error. Finally, we show that the MUSIC algorithm can provide very accurate range estimates for distances less than the Fraunhofer distance. This estimate gradually becomes inaccurate as the distances exceed the Fraunhofer distance.
Joint 9D Receiver Localization and Ephemeris Correction with LEO and $5$G Base Stations
Sep 03, 2024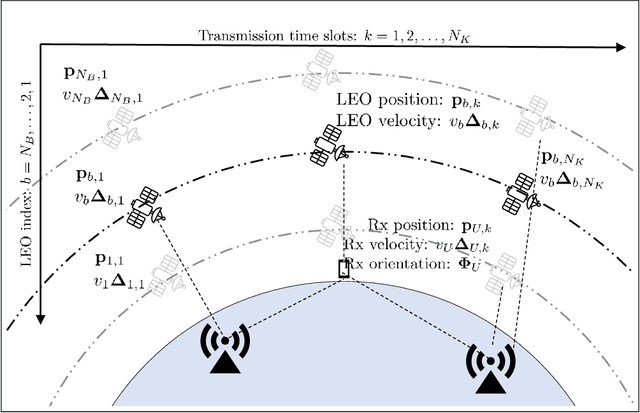
In this paper, we use the Fisher information matrix (FIM) to analyze the interaction between low-earth orbit (LEO) satellites and $5$G base stations in providing $9$D receiver localization and correcting LEO ephemeris. First, we give a channel model that captures all the information in the LEO-receiver, LEO-BS, and BS-receiver links. Subsequently, we use FIM to capture the amount of information about the channel parameters in these links. Then, we transform these FIM for channel parameters to the FIM for the $9$D ($3$D position, $3$D orientation, and $3$D velocity estimation) receiver localization parameters and the LEO position and velocity offset. Closed-form expressions for the entries in the FIM for these location parameters are presented. Our results on identifiability utilizing the FIM for the location parameters indicate: i) with one LEO, we need three BSs and three time slots to both estimate the $9$D location parameters and correct the LEO position and velocity, ii) with two LEO, we need three BSs and three time slots to both estimate the $9$D location parameters and correct the LEO position and velocity, and iii) with three LEO, we need three BSs and four-time slots to both estimate the $9$D location parameters and correct the LEO position and velocity. Another key insight is that through the Cramer Rao lower bound we show that with a single LEO, three time slots, and three BSs, the receiver positioning error, velocity estimation error, orientation error, LEO position offset estimation error, and LEO velocity offset estimation error are $0.1 \text{ cm}$, $1 \text{ mm/s}$, $10^{-3} \text{ rad}$, $0.01 \text{ m}$, and $1 \text{ m/s}$, respectively.
Fundamentals of LEO Based Localization
Sep 03, 2024In this paper, we derive the fundamental limits of low earth orbit (LEO) enabled localization by analyzing the available information in signals from multiple LEOs during different transmission time slots received on a multiple antennas and evaluate the utility of these signals for $9$D localization ($3$D position, $3$D orientation, and $3$D velocity estimation). We start by deriving the Fisher Information Matrix (FIM) for the channel parameters that are present in the signals received from LEOs in the same or multiple constellations during multiple transmission time slots. To accomplish this, we define a system model that captures i) time offset between LEOs caused by having relatively cheap clocks, ii) frequency offset between LEOs, iii) the unknown Doppler rate caused by high mobility LEOs, and iv) multiple transmission time slots from a particular LEO. We transform the FIM for the channel parameters to the FIM for the location parameters and determine the required conditions for localization. To do this, we start with the $3$D localization cases: i) $3$D positioning with known velocity and orientation, ii) $3$D orientation estimation with known position and velocity, and iii) $3$D velocity estimation with known position and orientation. Subsequently, we derive the FIM for the full $9$D localization case ($3$D position, $3$D orientation, and $3$D velocity estimation) in terms of the FIM for the $3$D localization. Using these results, we determine the number of LEOs, the operating frequency, the number of transmission time slots, and the number of receive antennas that allow for different levels of location estimation.
On the Limits of Single Anchor Localization: Near-Field vs Far-Field
Jun 30, 2023It is well known that a single anchor can be used to determine the position and orientation of an agent communicating with it. However, it is not clear what information about the anchor or the agent is necessary to perform this localization, especially when the agent is in the near-field of the anchor. Hence, in this paper, to investigate the limits of localizing an agent with some uncertainty in the anchor location, we consider a wireless link consisting of source and destination nodes. More specifically, we present a Fisher information theoretical investigation of the possibility of estimating different combinations of the source and destination's position and orientation from the signal received at the destination. To present a comprehensive study, we perform this Fisher information theoretic investigation under both the near and far field propagation models. One of the key insights is that while the source or destination's $3$D orientation can be jointly estimated with the source or destination's $3$D position in the near-field propagation regime, only the source or destination's $2$D orientation can be jointly estimated with the source or destination's $2$D position in the far-field propagation regime. Also, a simulation of the FIM indicates that in the near-field, we can estimate the source's $3$D orientation angles with no beamforming, but in the far-field, we can not estimate the source's $2$D orientation angles when no beamforming is employed.
RIS-Aided Kinematic Analysis for Remote Rehabilitation
Jun 30, 2023This paper is the first to introduce the idea of using reconfigurable intelligent surfaces (RISs) as passive devices that measure the position and orientation of certain human body parts over time. In this paper, we investigate the possibility of utilizing the available geometric information provided by on-body RISs that reflect signals from an off-body transmitter to an off-body receiver for stroke rehabilitation. More specifically, we investigate the possibility of using on-body RISs to estimate the location information over time of upper limbs that may have been impaired due to stroke. This location information can help medical professionals to estimate the possibly time varying pose and obtain progress on the rehabilitation of the upper limbs. Our analysis is focused on two scenarios: i) after assessment exercises for stroke rehabilitation when the upper limbs are resting at predefined points in the rehabilitation center, and ii) during the assessment exercises. In the first scenario, we explore the possibility of upper limb orientation estimation by deriving the Fisher information matrix (FIM) under near-field and far-field propagation conditions. It is noteworthy that the FIM quantifies how accurately we can estimate location information from a signal, and any subsequent algorithm is bounded by a function of the FIM. Coming to our propagation assumptions, the difference between the near-field and far-field regimes lies in the curvature of the wavefront. In the near-field, a receiver experiences a spherical wavefront, whereas in the far-field, the wavefront is approximately linear. The threshold to be within the near-field can be on the order of $10 \text{ m}.$
Iterative RNDOP-Optimal Anchor Placement for Beyond Convex Hull ToA-based Localization: Performance Bounds and Heuristic Algorithms
Dec 17, 2022Localizing targets outside the anchors' convex hull is an understudied but prevalent scenario in vehicle-centric, UAV-based, and self-localization applications. Considering such scenarios, this paper studies the optimal anchor placement problem for Time-of-Arrival (ToA)-based localization schemes such that the worst-case Dilution of Precision (DOP) is minimized. Building on prior results on DOP scaling laws for beyond convex hull ToA-based localization, we propose a novel metric termed the Range-Normalized DOP (RNDOP). We show that the worst-case DOP-optimal anchor placement problem simplifies to a min-max RNDOP-optimal anchor placement problem. Unfortunately, this formulation results in a non-convex and intractable problem under realistic constraints. To overcome this, we propose iterative anchor addition schemes, which result in a tractable albeit non-convex problem. By exploiting the structure arising from the resultant rank-1 update, we devise three heuristic schemes with varying performance-complexity tradeoffs. In addition, we also derive the upper and lower bounds for scenarios where we are placing anchors to optimize the worst-case (a) 3D positioning error and (b) 2D positioning error. We build on these results to design a cohesive iterative algorithmic framework for robust anchor placement and then discuss the computational complexity of the proposed schemes. Using numerical results, we validate the accuracy of our theoretical results. We also present comprehensive Monte-Carlo simulation results to compare the positioning error and execution time performance of each iterative scheme, discuss the tradeoffs, and provide valuable system design insights for beyond convex hull localization scenarios.
RIS-Aided Localization under Position and Orientation Offsets in the Near and Far Field
Oct 07, 2022


This paper presents a rigorous Bayesian analysis of the information in the signal (consisting of both the line-of-sight (LOS) path and reflections from multiple RISs) that originate from a single base station (BS) and is received by a user equipment (UE). For a comprehensive Bayesian analysis, both near and far field regimes are considered. The Bayesian analysis views both the location of the RISs and previous information about the UE as {\em a priori} information for UE localization. With outdated {\em a priori} information, the position and orientation offsets of the RISs become parameters that need to be estimated and fed back to the BS for correction. We first show that when the RIS elements have a half wavelength spacing, this RIS orientation offset is a factor in the pathloss of the RIS paths. Subsequently, we show through the Bayesian equivalent FIM (EFIM) for the channel parameters that the RIS orientation offset cannot be corrected when there is an unknown phase offset in the received signal in the far-field regime. However, the corresponding EFIM for the channel parameters in the received signal observed in the near-field shows that this unknown phase offset does not hinder the estimation of the RIS orientation offset when the UE has more than one receive antenna. Furthermore, we use the EFIM for the UE location parameters to present bounds for UE localization in the presence of RIS uncertainty. We rigorously show that regardless of size and propagation regime, the RISs are only helpful for localization when there is {\em a priori} information about the location of the RISs. Finally, through numerical analysis of the EFIM and its smallest eigenvalue, we demonstrate the loss in information when the far-field model is {\em incorrectly} applied to the signals received at a UE experiencing near-field propagation.