 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Anchor Placement for Wireless Localization in Mixed LOS and NLOS Scenarios
Apr 01, 2026We develop a unified Fisher-information framework for localization in environments with both Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS) paths, focusing on diffraction-dominated NLOS propagation characteristic of Outdoor-to-Indoor (O2I) signal propagation. The model couples anchor geometry with a physically grounded path-loss law that is continuous across the LOS/NLOS boundary and serves as an optimization objective for our optimal anchor placement problem. As the first step, we analyze single-target anchor placement and derive the classical A-, D-, and E-optimality criteria. Under a specific path-loss assumption, these criteria collapse to a polygon-closure condition in the complex plane: A-, D-, and E-optimal designs coincide, yielding necessary and sufficient conditions for optimal placement. Next, we extend the notion of optimal anchor placement with respect to a single target to optimality over a feasible region (multi-target setting) using a general formulation that explicitly includes a realistic path loss model. This is achieved by recasting the anchor placement as a combinatorial anchor-selection problem with provable guarantees. Next, we specify E- and D-optimal objectives over multiple targets in a predefined feasible target region and show that E-optimality straddles A-optimality (within a constant factor), while D-optimality provides looser bounds. These insights yield two practical algorithms, both mixed-integer second-order cone programs (MISOCP) with exact E-optimal and exact D-optimal objectives that produce robust, region-wide designs under mixed LOS/NLOS conditions.
Full Motion State Localization with Extra Large Aperture Arrays
Mar 26, 2026Conventional localization techniques typically assume far-field (FF) propagation characterized by planar wavefronts and simplified spatial relationships. The use of higher carrier frequencies has given rise to the paradigm of extra large aperture arrays (ELAAs) which consist of a large number of tightly packed antenna elements. These arrays have a large electrical aperture which increases the Fraunhofer distance making the FF assumption restrictive. As a result, near-field (NF) effects, such as spherical wavefront curvature, direction dependent gains, and spatial variations in Doppler and delay, become significant even at distances previously regarded as FF. This paradigm shift opens up new opportunities: the rich multi-parametric structure of NF models if properly exploited can enable superior localization accuracy. In this work, we investigate the potential of multi-snapshot, full-motion state (3D position, 3D velocity, and 2D orientation) estimation using delay and Doppler measurements for a mobile receiver equipped with a linear ELAA in an environment comprising a number of wideband anchors. We develop a signal model that captures both the NF propagation geometry and spatially varying Doppler effects. We perform an information-theoretic analysis to establish Cramer-Rao lower bounds (CRLB) on the achievable position error bound (PEB), velocity error bound (VEB), and orientation error bound (OEB), respectively. We reveal that delay measurements carry richer information than Doppler measurements, and standalone Doppler measurements cannot overcome information losses due to unknown channel gains and frequency offsets, enabling only coarse estimation capabilities. We also propose a maximum-likelihood (ML) approach to jointly estimate the 8D position parameters from measured channel characteristics.
LEO-based Carrier-Phase Positioning for 6G: Design Insights and Comparison with GNSS
Mar 18, 2026The integration of non-terrestrial networks (NTN) into 5G new radio (NR) enables a new class of positioning capabilities based on cellular signals transmitted by Low-Earth Orbit (LEO) satellites. In this paper, we investigate joint delay-and-carrier-phase positioning for LEO-based NR-NTN systems and provide a convergence-centric comparison with Global Navigation Satellite Systems (GNSS). We show that the rapid orbital motion of LEO satellites induces strong temporal and geometric diversity across observation epochs, thereby improving the conditioning of multi-epoch carrier-phase models and enabling significantly faster integer-ambiguity convergence. To enable robust carrier-phase tracking under intermittent positioning reference signal (PRS) transmissions, we propose a dual-waveform design that combines wideband PRS for delay estimation with a continuous narrowband carrier for phase tracking. Using a realistic simulation framework incorporating LEO orbit dynamics, we demonstrate that LEO-based joint delay-and-carrier-phase positioning achieves cm-level accuracy with convergence times on the order of a few seconds, whereas GNSS remains limited to meter-level accuracy over comparable short observation windows. These results establish LEO-based cellular positioning as a strong complement and potential alternative to GNSS for high-accuracy positioning, navigation, and timing (PNT) services in future wireless networks.
A New Statistical Approach to Calibration-Free Localization Using Unlabeled Crowdsourced Data
Apr 04, 2025Fingerprinting-based indoor localization methods typically require labor-intensive site surveys to collect signal measurements at known reference locations and frequent recalibration, which limits their scalability. This paper addresses these challenges by presenting a novel approach for indoor localization that utilizes crowdsourced data {\em without location labels}. We leverage the statistical information of crowdsourced data and propose a cumulative distribution function (CDF) based distance estimation method that maps received signal strength (RSS) to distances from access points. This approach overcomes the limitations of conventional distance estimation based on the empirical path loss model by efficiently capturing the impacts of shadow fading and multipath. Compared to fingerprinting, our {\em unsupervised} statistical approach eliminates the need for signal measurements at known reference locations. The estimated distances are then integrated into a three-step framework to determine the target location. The localization performance of our proposed method is evaluated using RSS data generated from ray-tracing simulations. Our results demonstrate significant improvements in localization accuracy compared to methods based on the empirical path loss model. Furthermore, our statistical approach, which relies on unlabeled data, achieves localization accuracy comparable to that of the {\em supervised} approach, the $k$-Nearest Neighbor ($k$NN) algorithm, which requires fingerprints with location labels. For reproducibility and future research, we make the ray-tracing dataset publicly available at [2].
Indoor Positioning for Public Safety: Role of UAVs, LEOs, and Propagation-Aware Techniques
Mar 15, 2025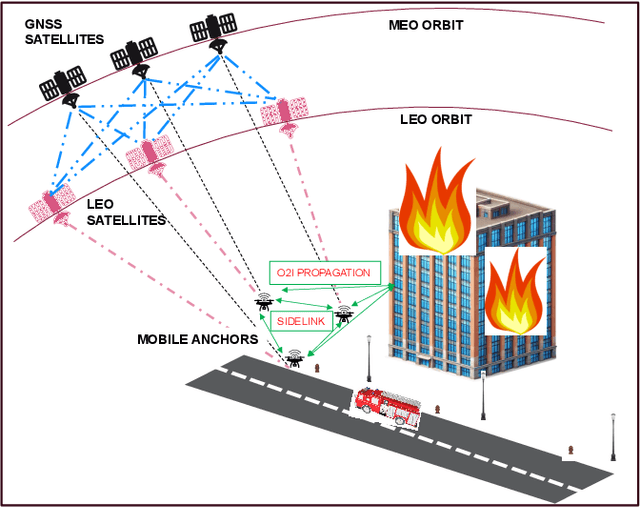


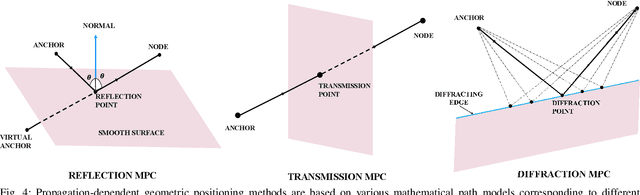
Effective indoor positioning is critical for public safety, enabling first responders to locate at-risk individuals accurately during emergency scenarios. However, traditional Global Navigation Satellite Systems (GNSS) often perform poorly indoors due to poor coverage and non-line-of-sight (NLOS) conditions. Moreover, relying on fixed cellular infrastructure, such as terrestrial networks (TNs), may not be feasible, as indoor signal coverage from a sufficient number of base stations or WiFi access points cannot be guaranteed for accurate positioning. In this paper, we propose a rapidly deployable indoor positioning system (IPS) leveraging mobile anchors, including uncrewed aerial vehicles (UAVs) and Low-Earth-Orbit (LEO) satellites, and discuss the role of GNSS and LEOs in localizing the mobile anchors. Additionally, we discuss the role of sidelink-based positioning, which is introduced in 3rd Generation Partnership Project (3GPP) Release 18, in enabling public safety systems. By examining outdoor-to-indoor (O2I) signal propagation, particularly diffraction-based approaches, we highlight how propagation-aware positioning methods can outperform conventional strategies that disregard propagation mechanism information. The study highlights how emerging 5G Advanced and Non-Terrestrial Networks (NTN) features offer new avenues to improve positioning in challenging indoor environments, ultimately paving the way for cost-effective and resilient IPS solutions tailored to public safety applications.
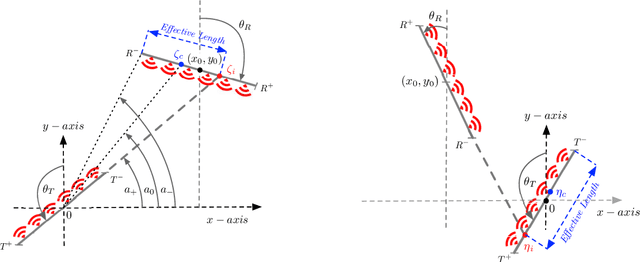
Impact of Frequency on Diffraction-Aided Wireless Positioning
Mar 15, 2025



This paper tackles the challenge of accurate positioning in Non-Line-of-Sight (NLoS) environments, with a focus on indoor public safety scenarios where NLoS bias severely impacts localization performance. We explore Diffraction MultiPath Components (MPC) as a critical mechanism for Outdoor-to-Indoor (O2I) signal propagation and its role in positioning. The proposed system comprises outdoor Uncrewed Aerial Vehicle (UAV) transmitters and indoor receivers that require localization. To facilitate diffraction-based positioning, we develop a method to isolate diffraction MPCs at indoor receivers and validate its effectiveness using a ray-tracing-generated dataset, which we have made publicly available. Our evaluation across the FR1, FR2, and FR3 frequency bands within the 5G/6G spectrum confirms the viability of diffraction-based positioning techniques for next-generation wireless networks.
Deterministic and Statistical Analysis of the DoF of Continuous Linear Arrays in the Near Field
Mar 12, 2025


This paper examines the number of communication modes, that is, the degrees of freedom (DoF), in a wireless setup comprising a small continuous linear intelligent antenna array in the near field of a large one. The framework allows for any orientations between the arrays and any positions in a two-dimensional space assuming that the transmitting array is placed at the origin. Therefore, apart from the length of the two continuous arrays, four key parameters determine the DoF and are hence considered in the analysis: the Cartesian coordinates of the center of the receiving array and two angles that model the rotation of each array around its center. The paper starts with the calculation of the deterministic DoF for a generic geometric setting, which extends beyond the widely studied paraxial case. Subsequently, a stochastic geometry framework is proposed to study the statistical DoF, as a first step towards the investigation of the system-level performance in near field networks. Numerical results applied to millimeter wave networks reveal the large number of DoF provided by near-field communications and unveiled key system-level insights.
Age of Positioning with Stochastic Motion Models
Mar 11, 2025Age of Information (AoI) is a key metric used for evaluating data freshness in communication networks, particularly in systems requiring real-time updates. In positioning applications, maintaining low AoI is critical for ensuring timely and accurate position estimation. This paper introduces an age-informed metric, which we term as Age of Positioning (AoP), that captures the temporal evolution of positioning accuracy for agents following random trajectories and sharing sporadic location updates. Using the widely adopted Random Waypoint (RWP) mobility model, which captures stochastic user movement through waypoint-based trajectories, we derive closed-form expressions for this metric under various queuing disciplines and different modes of operation of the agent. The analytical results are verified with numerical simulations, and the existence of optimal operating conditions is demonstrated.
Determinantal Learning for Subset Selection in Wireless Networks
Mar 05, 2025Subset selection is central to many wireless communication problems, including link scheduling, power allocation, and spectrum management. However, these problems are often NP-complete, because of which heuristic algorithms applied to solve these problems struggle with scalability in large-scale settings. To address this, we propose a determinantal point process-based learning (DPPL) framework for efficiently solving general subset selection problems in massive networks. The key idea is to model the optimal subset as a realization of a determinantal point process (DPP), which balances the trade-off between quality (signal strength) and similarity (mutual interference) by enforcing negative correlation in the selection of {\em similar} links (those that create significant mutual interference). However, conventional methods for constructing similarity matrices in DPP impose decomposability and symmetry constraints that often do not hold in practice. To overcome this, we introduce a new method based on the Gershgorin Circle Theorem for constructing valid similarity matrices. The effectiveness of the proposed approach is demonstrated by applying it to two canonical wireless network settings: an ad hoc network in 2D and a cellular network serving drones in 3D. Simulation results show that DPPL selects near-optimal subsets that maximize network sum-rate while significantly reducing computational complexity compared to traditional optimization methods, demonstrating its scalability for large-scale networks.
Two-Stage Weighted Projection for Reliable Low-Complexity Cooperative and Non-Cooperative Localization
Feb 26, 2025In this paper, we propose a two-stage weighted projection method (TS-WPM) for time-difference-of-arrival (TDOA)-based localization, providing provable improvements in positioning accuracy, particularly under high geometric dilution of precision (GDOP) and low signal-to-noise ratio (SNR) conditions. TS-WPM employs a two-stage iterative refinement approach that dynamically updates both range and position estimates, effectively mitigating residual errors while maintaining computational efficiency. Additionally, we extend TS-WPM to support cooperative localization by leveraging two-way time-of-arrival (TW-TOA) measurements, which enhances positioning accuracy in scenarios with limited anchor availability. To analyze TS-WPM, we derive its error covariance matrix and mean squared error (MSE), establishing conditions for its optimality and robustness. To facilitate rigorous evaluation, we develop a 3rd Generation Partnership Project (3GPP)-compliant analytical framework, incorporating 5G New Radio (NR) physical layer aspects as well as large-scale and small-scale fading. As part of this, we derive a generalized Cram{\'e}r-Rao lower bound (CRLB) for multipath propagation and introduce a novel non-line-of-sight (NLOS) bias model that accounts for propagation conditions and SNR variations. Our evaluations demonstrate that TS-WPM achieves near-CRLB performance and consistently outperforms state-of-the-art weighted nonlinear least squares (WNLS) in high GDOP and low SNR scenarios. Moreover, cooperative localization with TS-WPM significantly enhances accuracy, especially when an insufficient number of anchors (such as 2) are visible. Finally, we analyze the computational complexity of TS-WPM, showing its balanced trade-off between accuracy and efficiency, making it a scalable solution for real-time localization in next-generation networks.