 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEO-based Carrier-Phase Positioning for 6G: Design Insights and Comparison with GNSS
Mar 18, 2026The integration of non-terrestrial networks (NTN) into 5G new radio (NR) enables a new class of positioning capabilities based on cellular signals transmitted by Low-Earth Orbit (LEO) satellites. In this paper, we investigate joint delay-and-carrier-phase positioning for LEO-based NR-NTN systems and provide a convergence-centric comparison with Global Navigation Satellite Systems (GNSS). We show that the rapid orbital motion of LEO satellites induces strong temporal and geometric diversity across observation epochs, thereby improving the conditioning of multi-epoch carrier-phase models and enabling significantly faster integer-ambiguity convergence. To enable robust carrier-phase tracking under intermittent positioning reference signal (PRS) transmissions, we propose a dual-waveform design that combines wideband PRS for delay estimation with a continuous narrowband carrier for phase tracking. Using a realistic simulation framework incorporating LEO orbit dynamics, we demonstrate that LEO-based joint delay-and-carrier-phase positioning achieves cm-level accuracy with convergence times on the order of a few seconds, whereas GNSS remains limited to meter-level accuracy over comparable short observation windows. These results establish LEO-based cellular positioning as a strong complement and potential alternative to GNSS for high-accuracy positioning, navigation, and timing (PNT) services in future wireless networks.
Indoor Positioning for Public Safety: Role of UAVs, LEOs, and Propagation-Aware Techniques
Mar 15, 2025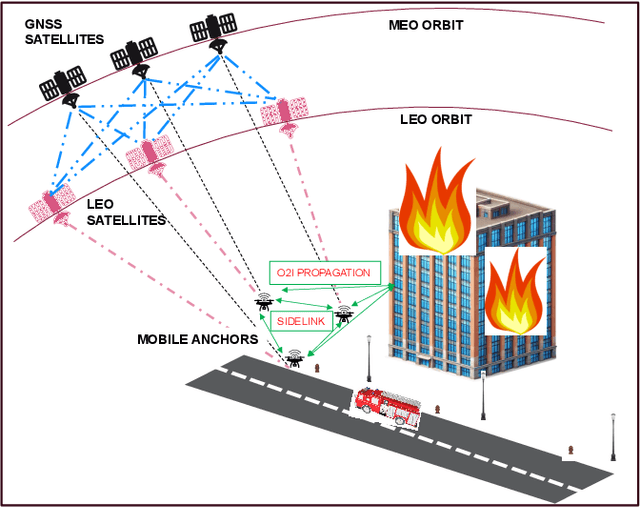


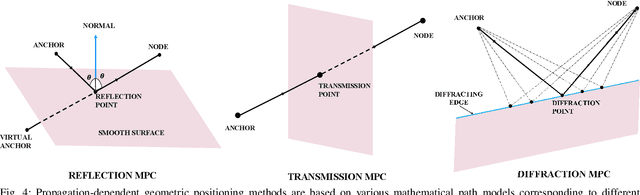
Effective indoor positioning is critical for public safety, enabling first responders to locate at-risk individuals accurately during emergency scenarios. However, traditional Global Navigation Satellite Systems (GNSS) often perform poorly indoors due to poor coverage and non-line-of-sight (NLOS) conditions. Moreover, relying on fixed cellular infrastructure, such as terrestrial networks (TNs), may not be feasible, as indoor signal coverage from a sufficient number of base stations or WiFi access points cannot be guaranteed for accurate positioning. In this paper, we propose a rapidly deployable indoor positioning system (IPS) leveraging mobile anchors, including uncrewed aerial vehicles (UAVs) and Low-Earth-Orbit (LEO) satellites, and discuss the role of GNSS and LEOs in localizing the mobile anchors. Additionally, we discuss the role of sidelink-based positioning, which is introduced in 3rd Generation Partnership Project (3GPP) Release 18, in enabling public safety systems. By examining outdoor-to-indoor (O2I) signal propagation, particularly diffraction-based approaches, we highlight how propagation-aware positioning methods can outperform conventional strategies that disregard propagation mechanism information. The study highlights how emerging 5G Advanced and Non-Terrestrial Networks (NTN) features offer new avenues to improve positioning in challenging indoor environments, ultimately paving the way for cost-effective and resilient IPS solutions tailored to public safety applications.
Two-Stage Weighted Projection for Reliable Low-Complexity Cooperative and Non-Cooperative Localization
Feb 26, 2025In this paper, we propose a two-stage weighted projection method (TS-WPM) for time-difference-of-arrival (TDOA)-based localization, providing provable improvements in positioning accuracy, particularly under high geometric dilution of precision (GDOP) and low signal-to-noise ratio (SNR) conditions. TS-WPM employs a two-stage iterative refinement approach that dynamically updates both range and position estimates, effectively mitigating residual errors while maintaining computational efficiency. Additionally, we extend TS-WPM to support cooperative localization by leveraging two-way time-of-arrival (TW-TOA) measurements, which enhances positioning accuracy in scenarios with limited anchor availability. To analyze TS-WPM, we derive its error covariance matrix and mean squared error (MSE), establishing conditions for its optimality and robustness. To facilitate rigorous evaluation, we develop a 3rd Generation Partnership Project (3GPP)-compliant analytical framework, incorporating 5G New Radio (NR) physical layer aspects as well as large-scale and small-scale fading. As part of this, we derive a generalized Cram{\'e}r-Rao lower bound (CRLB) for multipath propagation and introduce a novel non-line-of-sight (NLOS) bias model that accounts for propagation conditions and SNR variations. Our evaluations demonstrate that TS-WPM achieves near-CRLB performance and consistently outperforms state-of-the-art weighted nonlinear least squares (WNLS) in high GDOP and low SNR scenarios. Moreover, cooperative localization with TS-WPM significantly enhances accuracy, especially when an insufficient number of anchors (such as 2) are visible. Finally, we analyze the computational complexity of TS-WPM, showing its balanced trade-off between accuracy and efficiency, making it a scalable solution for real-time localization in next-generation networks.
LEO-based Positioning: Foundations, Signal Design, and Receiver Enhancements for 6G NTN
Oct 23, 2024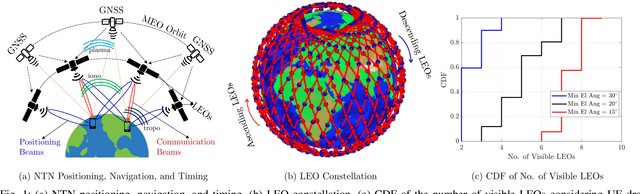
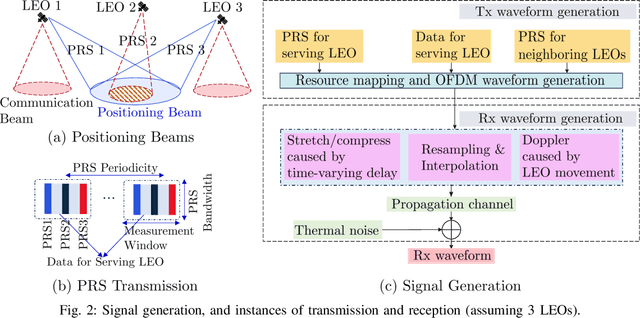
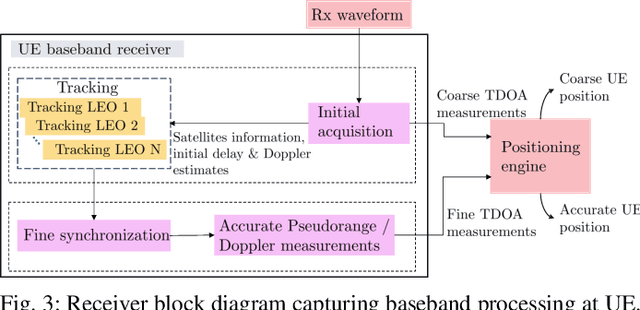
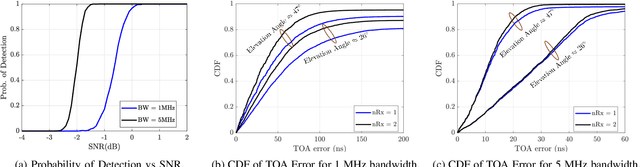
The integration of non-terrestrial networks (NTN) into 5G new radio (NR) has opened up the possibility of developing a new positioning infrastructure using NR signals from Low-Earth Orbit (LEO) satellites. LEO-based cellular positioning offers several advantages, such as a superior link budget, higher operating bandwidth, and large forthcoming constellations. Due to these factors, LEO-based positioning, navigation, and timing (PNT) is a potential enhancement for NTN in 6G cellular networks. However, extending the existing terrestrial cellular positioning methods to LEO-based NTN positioning requires considering key fundamental enhancements. These include creating broad positioning beams orthogonal to conventional communication beams, time-domain processing at the user equipment (UE) to resolve large delay and Doppler uncertainties, and efficiently accommodating positioning reference signals (PRS) from multiple satellites within the communication resource grid. In this paper, we present the first set of design insights by incorporating these enhancements and thoroughly evaluating LEO-based positioning, considering the constraints and capabilities of the NR-NTN physical layer. To evaluate the performance of LEO-based NTN positioning, we develop a comprehensive NR-compliant simulation framework, including LEO orbit simulation, transmission (Tx) and receiver (Rx) architectures, and a positioning engine incorporating the necessary enhancements. Our findings suggest that LEO-based NTN positioning could serve as a complementary infrastructure to existing Global Navigation Satellite Systems (GNSS) and, with appropriate enhancements, may also offer a viable alternative.
NTN-based 6G Localization: Vision, Role of LEOs, and Open Problems
May 20, 2023
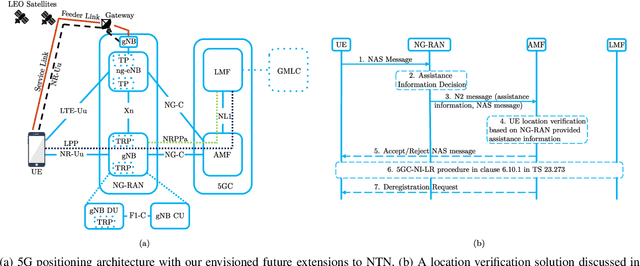
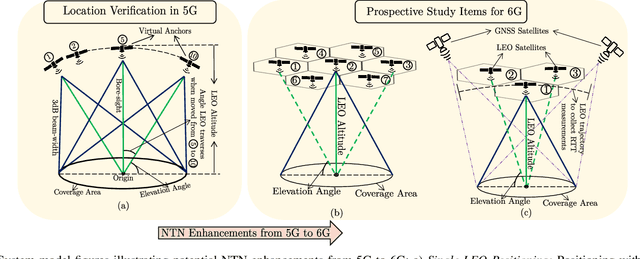
Since the introduction of 5G Release 18, non-terrestrial networks (NTNs) based positioning has garnered significant interest due to its numerous applications, including emergency services, lawful intercept, and charging and tariff services. This release considers single low-earth-orbit (LEO) positioning explicitly for {\em location verification} purposes, which requires a fairly coarse location estimate. To understand the future trajectory of NTN-based localization in 6G, we first provide a comprehensive overview of the evolution of 3rd Generation Partnership Project (3GPP) localization techniques, with specific emphasis on the current activities in 5G related to NTN location verification. In order to provide support for more accurate positioning in 6G using LEOs, we identify two NTN positioning systems that are likely study items for 6G: (i) multi-LEO positioning, and (ii) augmenting single-LEO based location verification setup with Global Navigation Satellite System (GNSS), especially when an insufficient number of GNSS satellites (such as 2) are visible. We evaluate the accuracy of both systems through a 3GPP-compliant simulation study using a Cram\'{e}r-Rao lower bound (CRLB) analysis. Our findings suggest that NTN technology has significant potential to provide accurate positioning of UEs in scenarios where GNSS signals may be weak or unavailable, but there are technical challenges in accommodating these solutions in 3GPP. We conclude with a discussion on the research landscape and key open problems related to NTN-based positioning.