 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Anchor Placement for Wireless Localization in Mixed LOS and NLOS Scenarios
Apr 01, 2026We develop a unified Fisher-information framework for localization in environments with both Line-of-Sight (LOS) and Non-Line-of-Sight (NLOS) paths, focusing on diffraction-dominated NLOS propagation characteristic of Outdoor-to-Indoor (O2I) signal propagation. The model couples anchor geometry with a physically grounded path-loss law that is continuous across the LOS/NLOS boundary and serves as an optimization objective for our optimal anchor placement problem. As the first step, we analyze single-target anchor placement and derive the classical A-, D-, and E-optimality criteria. Under a specific path-loss assumption, these criteria collapse to a polygon-closure condition in the complex plane: A-, D-, and E-optimal designs coincide, yielding necessary and sufficient conditions for optimal placement. Next, we extend the notion of optimal anchor placement with respect to a single target to optimality over a feasible region (multi-target setting) using a general formulation that explicitly includes a realistic path loss model. This is achieved by recasting the anchor placement as a combinatorial anchor-selection problem with provable guarantees. Next, we specify E- and D-optimal objectives over multiple targets in a predefined feasible target region and show that E-optimality straddles A-optimality (within a constant factor), while D-optimality provides looser bounds. These insights yield two practical algorithms, both mixed-integer second-order cone programs (MISOCP) with exact E-optimal and exact D-optimal objectives that produce robust, region-wide designs under mixed LOS/NLOS conditions.
Impact of Frequency on Diffraction-Aided Wireless Positioning
Mar 15, 2025



This paper tackles the challenge of accurate positioning in Non-Line-of-Sight (NLoS) environments, with a focus on indoor public safety scenarios where NLoS bias severely impacts localization performance. We explore Diffraction MultiPath Components (MPC) as a critical mechanism for Outdoor-to-Indoor (O2I) signal propagation and its role in positioning. The proposed system comprises outdoor Uncrewed Aerial Vehicle (UAV) transmitters and indoor receivers that require localization. To facilitate diffraction-based positioning, we develop a method to isolate diffraction MPCs at indoor receivers and validate its effectiveness using a ray-tracing-generated dataset, which we have made publicly available. Our evaluation across the FR1, FR2, and FR3 frequency bands within the 5G/6G spectrum confirms the viability of diffraction-based positioning techniques for next-generation wireless networks.
Indoor Positioning for Public Safety: Role of UAVs, LEOs, and Propagation-Aware Techniques
Mar 15, 2025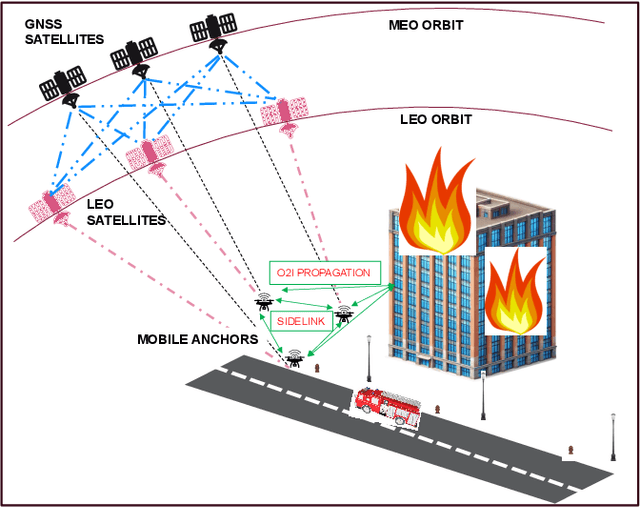


Effective indoor positioning is critical for public safety, enabling first responders to locate at-risk individuals accurately during emergency scenarios. However, traditional Global Navigation Satellite Systems (GNSS) often perform poorly indoors due to poor coverage and non-line-of-sight (NLOS) conditions. Moreover, relying on fixed cellular infrastructure, such as terrestrial networks (TNs), may not be feasible, as indoor signal coverage from a sufficient number of base stations or WiFi access points cannot be guaranteed for accurate positioning. In this paper, we propose a rapidly deployable indoor positioning system (IPS) leveraging mobile anchors, including uncrewed aerial vehicles (UAVs) and Low-Earth-Orbit (LEO) satellites, and discuss the role of GNSS and LEOs in localizing the mobile anchors. Additionally, we discuss the role of sidelink-based positioning, which is introduced in 3rd Generation Partnership Project (3GPP) Release 18, in enabling public safety systems. By examining outdoor-to-indoor (O2I) signal propagation, particularly diffraction-based approaches, we highlight how propagation-aware positioning methods can outperform conventional strategies that disregard propagation mechanism information. The study highlights how emerging 5G Advanced and Non-Terrestrial Networks (NTN) features offer new avenues to improve positioning in challenging indoor environments, ultimately paving the way for cost-effective and resilient IPS solutions tailored to public safety applications.
A Comprehensive Survey of Mamba Architectures for Medical Image Analysis: Classification, Segmentation, Restoration and Beyond
Oct 03, 2024Mamba, a special case of the State Space Model, is gaining popularity as an alternative to template-based deep learning approaches in medical image analysis. While transformers are powerful architectures, they have drawbacks, including quadratic computational complexity and an inability to address long-range dependencies efficiently. This limitation affects the analysis of large and complex datasets in medical imaging, where there are many spatial and temporal relationships. In contrast, Mamba offers benefits that make it well-suited for medical image analysis. It has linear time complexity, which is a significant improvement over transformers. Mamba processes longer sequences without attention mechanisms, enabling faster inference and requiring less memory. Mamba also demonstrates strong performance in merging multimodal data, improving diagnosis accuracy and patient outcomes. The organization of this paper allows readers to appreciate the capabilities of Mamba in medical imaging step by step. We begin by defining core concepts of SSMs and models, including S4, S5, and S6, followed by an exploration of Mamba architectures such as pure Mamba, U-Net variants, and hybrid models with convolutional neural networks, transformers, and Graph Neural Networks. We also cover Mamba optimizations, techniques and adaptations, scanning, datasets, applications, experimental results, and conclude with its challenges and future directions in medical imaging. This review aims to demonstrate the transformative potential of Mamba in overcoming existing barriers within medical imaging while paving the way for innovative advancements in the field. A comprehensive list of Mamba architectures applied in the medical field, reviewed in this work, is available at Github.
Diffraction Aided Wireless Positioning
Sep 04, 2024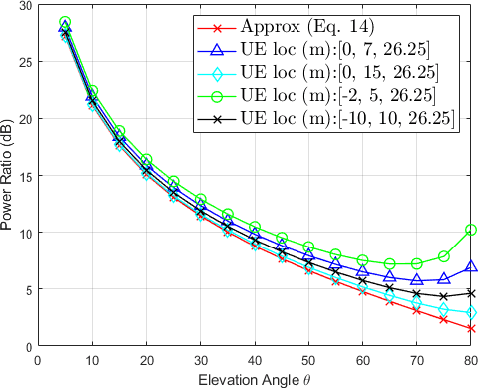
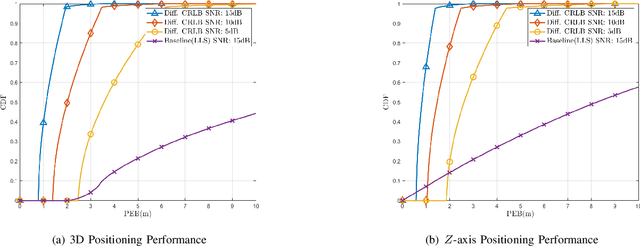
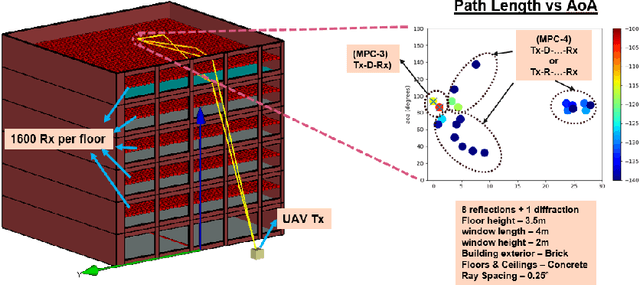
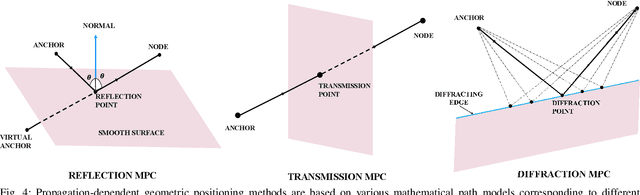
Wireless positioning in Non-Line-of-Sight (NLOS) scenarios is highly challenging due to multipath, which leads to deterioration in the positioning estimate. This study reexamines electromagnetic field principles and applies them to wireless positioning, resulting in new techniques that enhance positioning accuracy in NLOS scenarios. Further, we use the proposed method to analyze a public safety scenario where it is essential to determine the position of at-risk individuals within buildings, emphasizing improving the Z-axis position estimate. Our analysis uses the Geometrical Theory of Diffraction (GTD) to provide important signal propagation insights and develop a new NLOS path model. Next, we use Fisher information to derive necessary and sufficient conditions for 3D positioning using our proposed positioning technique and finally to lower bound the possible 3D and z-axis positioning performance. On applying this positioning technique in a public safety scenario, we show that it is possible to greatly improve both 3D and Z-axis positioning performance by directly estimating NLOS path lengths.
3D Positioning using a New Diffraction Path Model
May 09, 2024
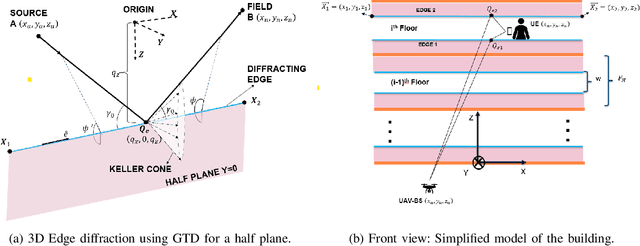


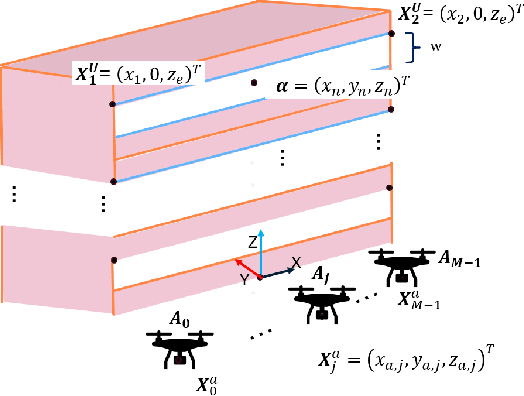
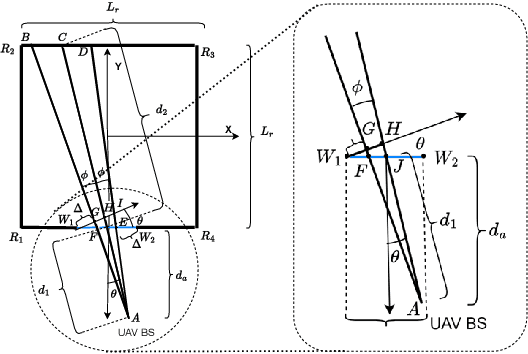
Enhancing 3D and Z-axis positioning accuracy is crucial for effective rescue in indoor emergencies, ensuring safety for emergency responders and at-risk individuals. Additionally, reducing the dependence of a positioning system on fixed infrastructure is crucial, given its vulnerability to power failures and damage during emergencies. Further challenges from a signal propagation perspective include poor indoor signal coverage, multipath effects and the problem of Non-Line-OfSight (NLOS) measurement bias. In this study, we utilize the mobility provided by a rapidly deployable Uncrewed Aerial Vehicle (UAV) based wireless network to address these challenges. We recognize diffraction from window edges as a crucial signal propagation mechanism and employ the Geometrical Theory of Diffraction (GTD) to introduce a novel NLOS path length model. Using this path length model, we propose two different techniques to improve the indoor positioning performance for emergency scenarios.
Line-of-Sight Probability for Outdoor-to-Indoor UAV-Assisted Emergency Networks
Feb 27, 2023


For emergency response scenarios like firefighting in urban environments, there is a need to both localize emergency responders inside the building and also support a high bandwidth communication link between the responders and a command-and-control center. The emergency networks for such scenarios can be established with the quick deployment of Unmanned Aerial Vehicles (UAVs). Further, the 3D mobility of UAVs can be leveraged to improve the quality of the wireless link by maneuvering them into advantageous locations. This has motivated recent propagation measurement campaigns to study low-altitude air-to-ground channels in both 5G-sub6 GHz and 5G-mmWave bands. In this paper, we develop a model for the link in a UAV-assisted emergency location and/or communication system. Specifically, given the importance of Line-of-Sight (LoS) links in localization as well as mmWave communication, we derive a closed-form expression for the LoS probability. This probability is parameterized by the UAV base station location, the size of the building, and the size of the window that offers the best propagation path. An expression for coverage probability is also derived. The LoS probability and coverage probabilities derived in this paper can be used to analyze the outdoor UAV-to-indoor propagation environment to determine optimal UAV positioning and the number of UAVs needed to achieve the desired performance of the emergency network.