 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Positioning using a New Diffraction Path Model
Paper and Code
May 09, 2024
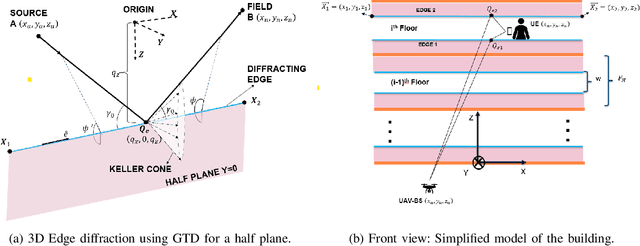


Enhancing 3D and Z-axis positioning accuracy is crucial for effective rescue in indoor emergencies, ensuring safety for emergency responders and at-risk individuals. Additionally, reducing the dependence of a positioning system on fixed infrastructure is crucial, given its vulnerability to power failures and damage during emergencies. Further challenges from a signal propagation perspective include poor indoor signal coverage, multipath effects and the problem of Non-Line-OfSight (NLOS) measurement bias. In this study, we utilize the mobility provided by a rapidly deployable Uncrewed Aerial Vehicle (UAV) based wireless network to address these challenges. We recognize diffraction from window edges as a crucial signal propagation mechanism and employ the Geometrical Theory of Diffraction (GTD) to introduce a novel NLOS path length model. Using this path length model, we propose two different techniques to improve the indoor positioning performance for emergency scenarios.