 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint 9D Receiver Localization and Ephemeris Correction with LEO and $5$G Base Stations
Paper and Code
Sep 03, 2024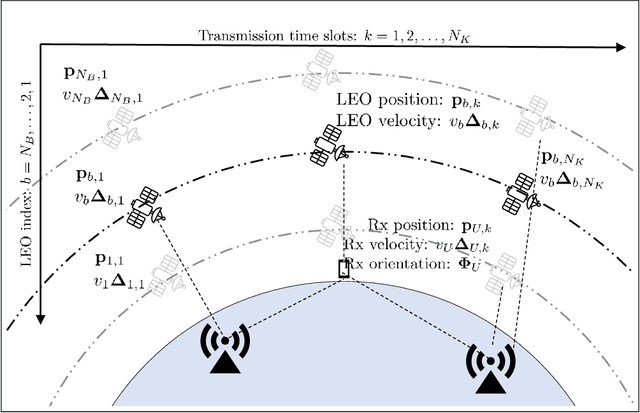
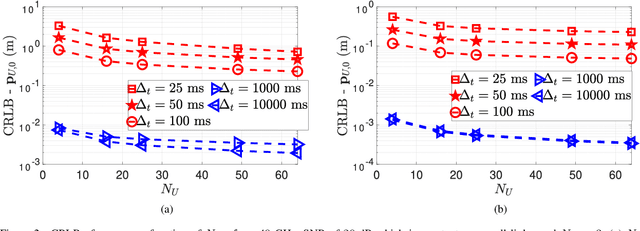
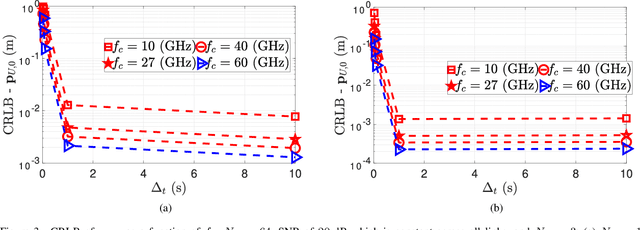
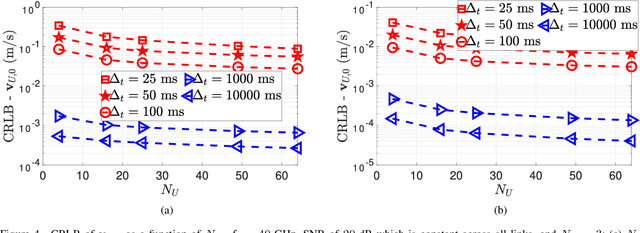
In this paper, we use the Fisher information matrix (FIM) to analyze the interaction between low-earth orbit (LEO) satellites and $5$G base stations in providing $9$D receiver localization and correcting LEO ephemeris. First, we give a channel model that captures all the information in the LEO-receiver, LEO-BS, and BS-receiver links. Subsequently, we use FIM to capture the amount of information about the channel parameters in these links. Then, we transform these FIM for channel parameters to the FIM for the $9$D ($3$D position, $3$D orientation, and $3$D velocity estimation) receiver localization parameters and the LEO position and velocity offset. Closed-form expressions for the entries in the FIM for these location parameters are presented. Our results on identifiability utilizing the FIM for the location parameters indicate: i) with one LEO, we need three BSs and three time slots to both estimate the $9$D location parameters and correct the LEO position and velocity, ii) with two LEO, we need three BSs and three time slots to both estimate the $9$D location parameters and correct the LEO position and velocity, and iii) with three LEO, we need three BSs and four-time slots to both estimate the $9$D location parameters and correct the LEO position and velocity. Another key insight is that through the Cramer Rao lower bound we show that with a single LEO, three time slots, and three BSs, the receiver positioning error, velocity estimation error, orientation error, LEO position offset estimation error, and LEO velocity offset estimation error are $0.1 \text{ cm}$, $1 \text{ mm/s}$, $10^{-3} \text{ rad}$, $0.01 \text{ m}$, and $1 \text{ m/s}$, respectively.