 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmooth real-time motion planning based on a cascade dual-quaternion screw-geometry MPC
Feb 07, 2024This paper investigates the tracking problem of a smooth coordinate-invariant trajectory using dual quaternion algebra. The proposed architecture consists of a cascade structure in which the outer-loop MPC performs real-time smoothing of the manipulator's end-effector twist while an inner-loop kinematic controller ensures tracking of the instantaneous desired end-effector pose. Experiments on a $7$-DoF Franka Emika Panda robotic manipulator validate the proposed method demonstrating its application to constraint the robot twists, accelerations and jerks within prescribed bounds.
Dynamic Modeling of Branched Robots using Modular Composition
Aug 03, 2022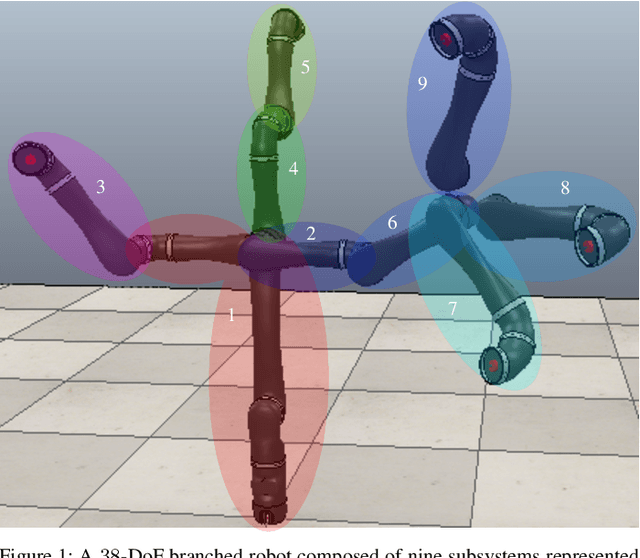
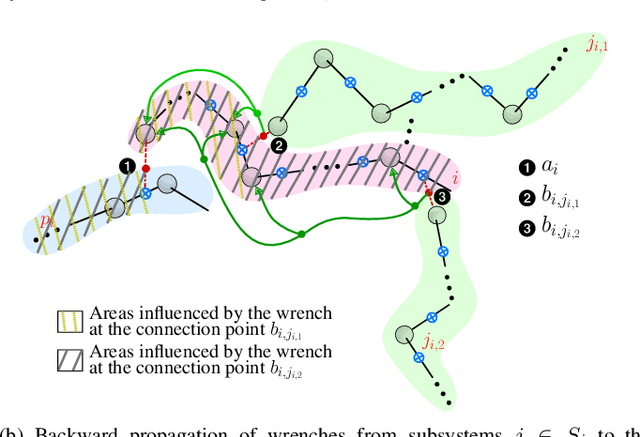
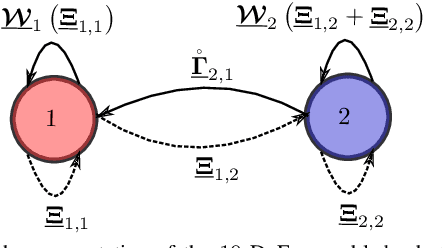
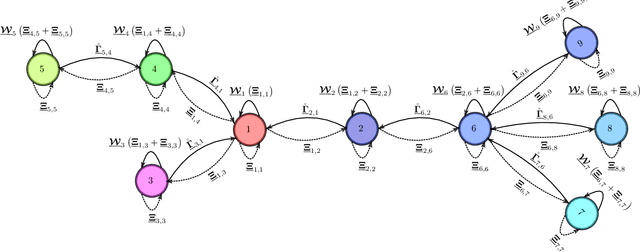
This letter proposes a systematic modular procedure for the dynamic modeling of branched robots comprising several subsystems, each of which being composed of multiple rigid bodies. Furthermore, the proposed strategy is applicable even if some subsystems are regarded as black boxes, requiring only the twists and wrenches at the connection points between different subsystems. To help in the model composition, we also propose a graph representation that encodes the propagation of twists and wrenches between the subsystems. Numerical results show that the proposed formalism is as accurate as a state-of-the-art library for robotic dynamic modeling.