 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverage First Next Best View for Inspection of Cluttered Pipe Networks Using Mobile Manipulators
Mar 17, 2026Robotic inspection of radioactive areas enables operators to be removed from hazardous environments; however, planning and operating in confined, cluttered environments remain challenging. These systems must autonomously reconstruct the unknown environment and cover its surfaces, whilst estimating and avoiding collisions with objects in the environment. In this paper, we propose a new planning approach based on next-best-view that enables simultaneous exploration and exploitation of the environment by reformulating the coverage path planning problem in terms of information gain. To handle obstacle avoidance under uncertainty, we extend the vector-field-inequalities framework to explicitly account for stochastic measurements of geometric primitives in the environment via chance constraints in a constrained optimal control law. The stochastic constraints were evaluated experimentally alongside the planner on a mobile manipulator in a confined environment to inspect a pipe network. These experiments demonstrate that the system can autonomously plan and execute inspection and coverage paths to reconstruct and fully cover the simplified pipe network. Moreover, the system successfully estimated geometric primitives online and avoided collisions during motion between viewpoints.
Object-Reconstruction-Aware Whole-body Control of Mobile Manipulators
Sep 04, 2025Object reconstruction and inspection tasks play a crucial role in various robotics applications. Identifying paths that reveal the most unknown areas of the object becomes paramount in this context, as it directly affects efficiency, and this problem is known as the view path planning problem. Current methods often use sampling-based path planning techniques, evaluating potential views along the path to enhance reconstruction performance. However, these methods are computationally expensive as they require evaluating several candidate views on the path. To this end, we propose a computationally efficient solution that relies on calculating a focus point in the most informative (unknown) region and having the robot maintain this point in the camera field of view along the path. We incorporated this strategy into the whole-body control of a mobile manipulator employing a visibility constraint without the need for an additional path planner. We conducted comprehensive and realistic simulations using a large dataset of 114 diverse objects of varying sizes from 57 categories to compare our method with a sampling-based planning strategy using Bayesian data analysis. Furthermore, we performed real-world experiments with an 8-DoF mobile manipulator to demonstrate the proposed method's performance in practice. Our results suggest that there is no significant difference in object coverage and entropy. In contrast, our method is approximately nine times faster than the baseline sampling-based method in terms of the average time the robot spends between views.
A study on the effects of mixed explicit and implicit communications in human-virtual-agent interactions
Sep 27, 2024



Communication between humans and robots (or virtual agents) is essential for interaction and often inspired by human communication, which uses gestures, facial expressions, gaze direction, and other explicit and implicit means. This work presents an interaction experiment where humans and virtual agents interact through explicit (gestures, manual entries using mouse and keyboard, voice, sound, and information on screen) and implicit (gaze direction, location, facial expressions, and raise of eyebrows) communication to evaluate the effect of mixed explicit-implicit communication against purely explicit communication. Results obtained using Bayesian parameter estimation show that the number of errors and task execution time did not significantly change when mixed explicit and implicit communications were used, and neither the perceived efficiency of the interaction. In contrast, acceptance, sociability, and transparency of the virtual agent increased when using mixed communication modalities (88.3%, 92%, and 92.9% of the effect size posterior distribution of each variable, respectively, were above the upper limit of the region of practical equivalence). This suggests that task-related measures, such as time, number of errors, and perceived efficiency of the interaction, have not been influenced by the communication type in our particular experiment. However, the improvement of subjective measures related to the virtual agent, such as acceptance, sociability, and transparency, suggests that humans are more receptive to mixed explicit and implicit communications.
Dynamic Modeling of Branched Robots using Modular Composition
Aug 03, 2022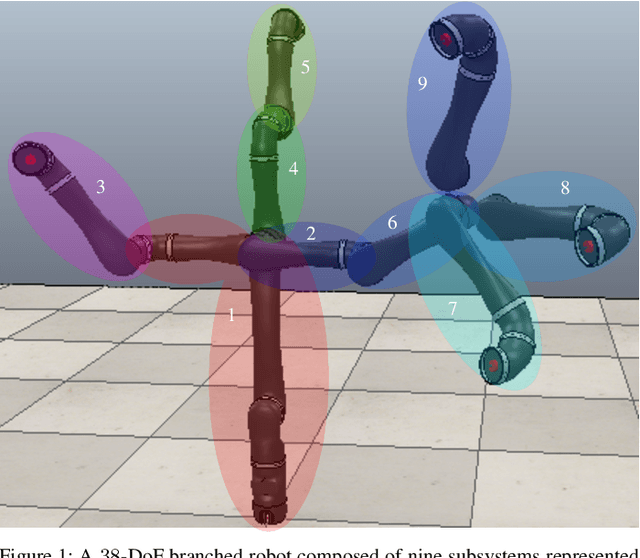
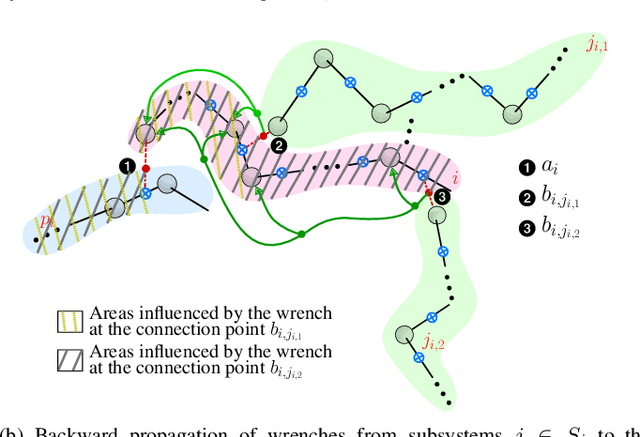
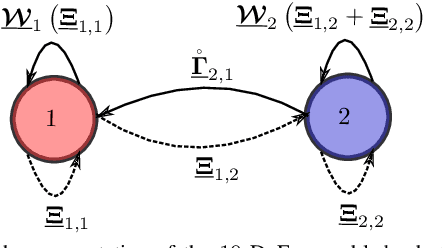
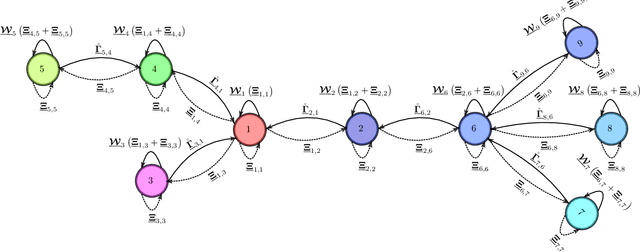
This letter proposes a systematic modular procedure for the dynamic modeling of branched robots comprising several subsystems, each of which being composed of multiple rigid bodies. Furthermore, the proposed strategy is applicable even if some subsystems are regarded as black boxes, requiring only the twists and wrenches at the connection points between different subsystems. To help in the model composition, we also propose a graph representation that encodes the propagation of twists and wrenches between the subsystems. Numerical results show that the proposed formalism is as accurate as a state-of-the-art library for robotic dynamic modeling.
Adaptive Constrained Kinematic Control using Partial or Complete Task-Space Measurements
Sep 14, 2021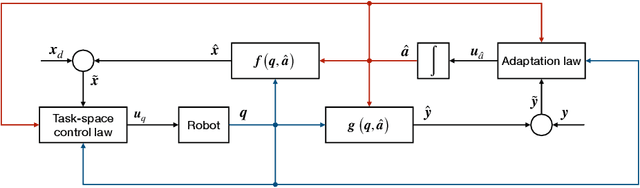


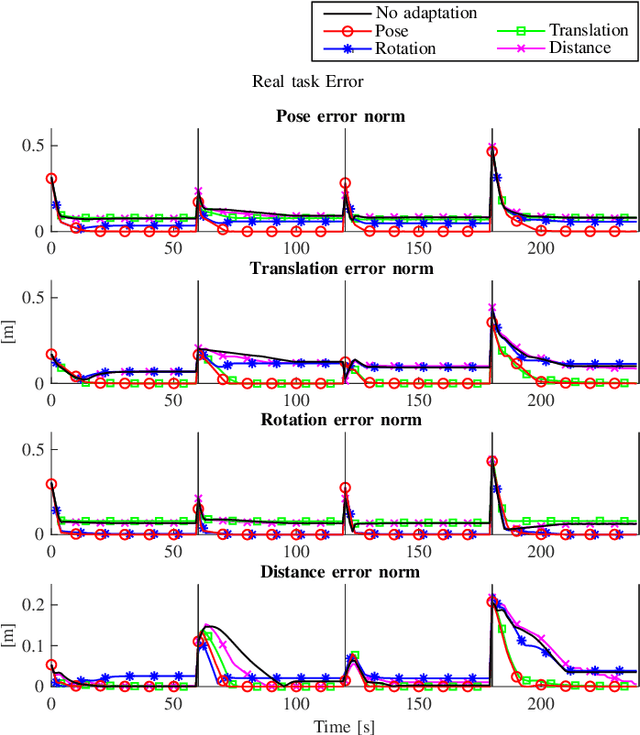
Recent advancements in constrained kinematic control make it an attractive strategy for controlling robots with arbitrary geometry in challenging tasks. Most current works assume that the robot kinematic model is precise enough for the task at hand. However, with increasing demands and safety requirements in robotic applications, there is a need for a controller that compensates online for kinematic inaccuracies. We propose an adaptive constrained kinematic control strategy based on quadratic programming, which uses partial or complete task-space measurements to compensate online for calibration errors. Our method is validated in experiments and simulations that show increased accuracy and safety compared to a state-of-the-art kinematic control strategy.
DQ Robotics: a Library for Robot Modeling and Control Using Dual Quaternion Algebra
Oct 25, 2019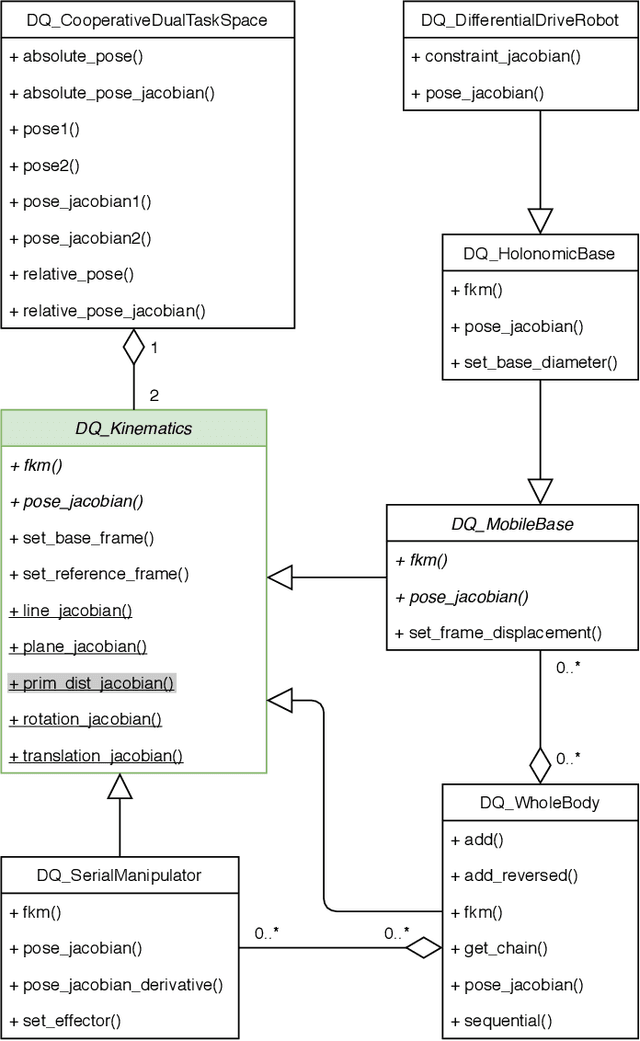



Dual quaternion algebra and its application to robotics have gained considerable interest in the last two decades. Dual quaternions have great geometric appeal and easily capture physical phenomena inside an algebraic framework that is useful for both robot modeling and control. Mathematical objects, such as points, lines, planes, infinite cylinders, spheres, coordinate systems, twists, and wrenches are all well defined as dual quaternions. Therefore, simple operators are used to represent those objects in different frames and operations such as inner products and cross products are used to extract useful geometric relationships between them. Nonetheless, the dual quaternion algebra is not widespread as it could be, mostly because efficient and easy-to-use computational tools are not abundant and usually are restricted to the particular algebra of quaternions. To bridge this gap between theory and implementation, this paper introduces DQ Robotics, a library for robot modeling and control using dual quaternion algebra that is easy to use and intuitive enough to be used for self-study and education while being computationally efficient for deployment on real applications.
Whole-Body Control with (Self) Collision Avoidance using Vector Field Inequalities
Aug 01, 2019



This work uses vector field inequalities (VFI) to prevent robot self-collisions and collisions with the workspace. Differently from previous approaches, the method is suitable for both velocity and torque-actuated robots. We propose a new distance function and its corresponding Jacobian in order to generate a VFI to limit the angle between two Pl\"ucker lines. This new VFI is used to prevent both undesired end-effector orientations and violation of joints limits. The proposed method is evaluated in a realistic simulation and on a real humanoid robot, showing that all constraints are respected while the robot performs a manipulation task.
* Accepted on IEEE Robotics and Automation Letters, 6 pages
Robust H-infinity kinematic control of manipulator robots using dual quaternion algebra
Nov 13, 2018



This paper proposes a robust dual-quaternion based H-infinity task-space controller for robot manipulators. To address the manipulator liability to modeling errors, uncertainties, exogenous disturbances, kinematic singularities, and their influence upon the kinematics of the end-effector pose (i.e., position and orientation), we adapt H-infinity techniques--suitable only for additive noises--to unit dual quaternions. The noise to error attenuation within the H-infinity framework has the additional advantage of casting aside requirements concerning noise distributions, which are significantly hard to characterize within the group of rigid body transformations. Using dual quaternion algebra, we provide a connection between performance effects over the end-effector trajectory and different sources of uncertainties and disturbances while satisfying attenuation requirements with minimum instantaneous control effort. The result is an easy-to-implement closed form H-infinity control design criterion. The H-infinity conditions derived in this paper are extended to conceive a new kinematic singularity avoidance technique suitable for the proposed non-Euclidean task-space manifold, which ensures proper behavior throughout the task space. The effectiveness and performance overview of the proposed strategies are evaluated within different realistic simulated scenarios.