 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Constrained Kinematic Control using Partial or Complete Task-Space Measurements
Paper and Code
Sep 14, 2021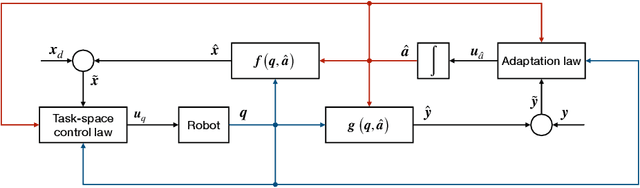


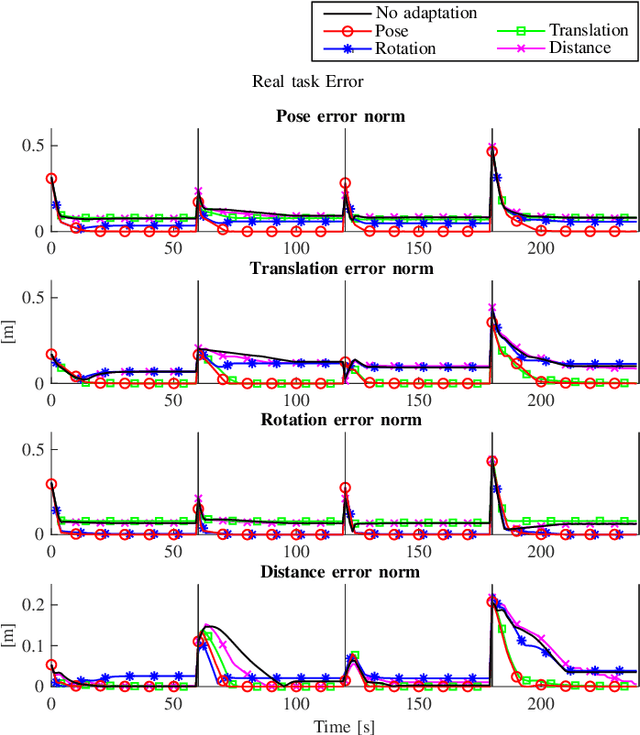
Recent advancements in constrained kinematic control make it an attractive strategy for controlling robots with arbitrary geometry in challenging tasks. Most current works assume that the robot kinematic model is precise enough for the task at hand. However, with increasing demands and safety requirements in robotic applications, there is a need for a controller that compensates online for kinematic inaccuracies. We propose an adaptive constrained kinematic control strategy based on quadratic programming, which uses partial or complete task-space measurements to compensate online for calibration errors. Our method is validated in experiments and simulations that show increased accuracy and safety compared to a state-of-the-art kinematic control strategy.