Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Modeling of Branched Robots using Modular Composition
Paper and Code
Aug 03, 2022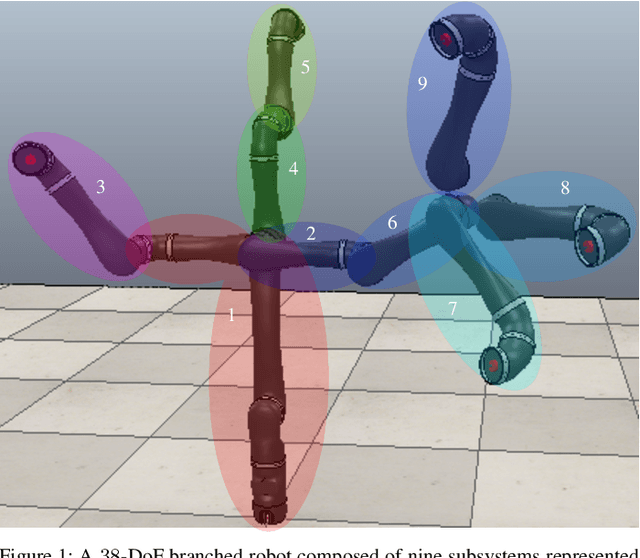
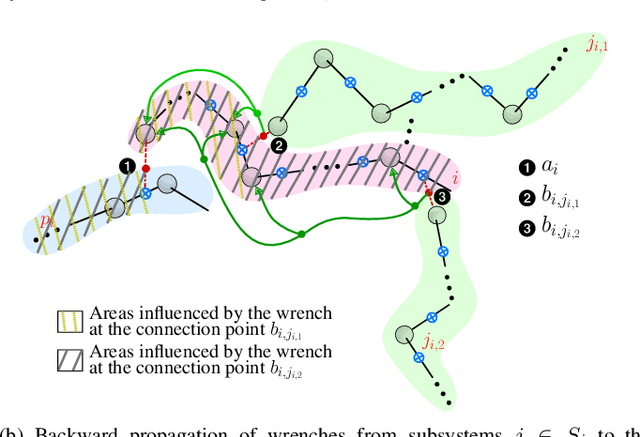
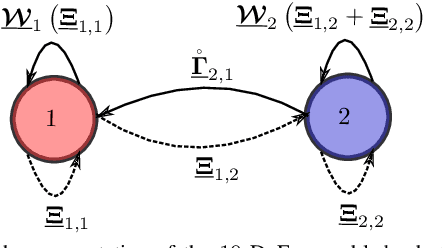
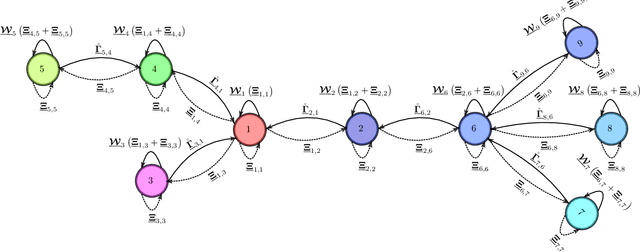
This letter proposes a systematic modular procedure for the dynamic modeling of branched robots comprising several subsystems, each of which being composed of multiple rigid bodies. Furthermore, the proposed strategy is applicable even if some subsystems are regarded as black boxes, requiring only the twists and wrenches at the connection points between different subsystems. To help in the model composition, we also propose a graph representation that encodes the propagation of twists and wrenches between the subsystems. Numerical results show that the proposed formalism is as accurate as a state-of-the-art library for robotic dynamic modeling.
* 7 pages, 5 figures, 2 tables. Under Review for the IEEE Robotics and
Automation Letters (RA-L)
View paper on