 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinToolSyn: A forward synthesis Framework for Financial Tool-Use Dialogue Data with Dynamic Tool Retrieval
Mar 25, 2026Tool-use capabilities are vital for Large Language Models (LLMs) in finance, a domain characterized by massive investment targets and data-intensive inquiries. However, existing data synthesis methods typically rely on a reverse synthesis paradigm, generating user queries from pre-sampled tools. This approach inevitably introduces artificial explicitness, yielding queries that fail to capture the implicit, event-driven nature of real-world needs. Moreover, its reliance on static tool sets overlooks the dynamic retrieval process required to navigate massive tool spaces. To address these challenges, we introduce \textit{FinToolSyn}, a forward synthesis framework designed to generate high-quality financial dialogues. Progressing from persona instruction and atomic tool synthesis to dynamic retrieval dialogue generation, our pipeline constructs a repository of 43,066 tools and synthesizes over 148k dialogue instances, incorporating dynamic retrieval to emulate the noisy candidate sets typical of massive tool spaces. We also establish a dedicated benchmark to evaluate tool-calling capabilities in realistic financial scenarios. Extensive experiments demonstrate that models trained on FinToolSyn achieve a 21.06\% improvement, providing a robust foundation for tool learning in financial scenarios.
Evaluating VLMs' Spatial Reasoning Over Robot Motion: A Step Towards Robot Planning with Motion Preferences
Mar 13, 2026Understanding user instructions and object spatial relations in surrounding environments is crucial for intelligent robot systems to assist humans in various tasks. The natural language and spatial reasoning capabilities of Vision-Language Models (VLMs) have the potential to enhance the generalization of robot planners on new tasks, objects, and motion specifications. While foundation models have been applied to task planning, it is still unclear the degree to which they have the capability of spatial reasoning required to enforce user preferences or constraints on motion, such as desired distances from objects, topological properties, or motion style preferences. In this paper, we evaluate the capability of four state-of-the-art VLMs at spatial reasoning over robot motion, using four different querying methods. Our results show that, with the highest-performing querying method, Qwen2.5-VL achieves 71.4% accuracy zero-shot and 75% on a smaller model after fine-tuning, and GPT-4o leads to lower performance. We evaluate two types of motion preferences (object-proximity and path-style), and we also analyze the trade-off between accuracy and computation cost in number of tokens. This work shows some promise in the potential of VLM integration with robot motion planning pipelines.
Coordinate Invariant User-Guided Constrained Path Planning with Reactive Rapidly Expanding Plane-Oriented Escaping Trees
Mar 20, 2022
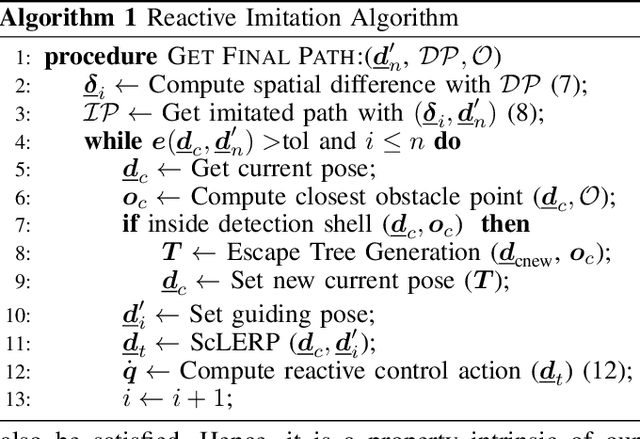
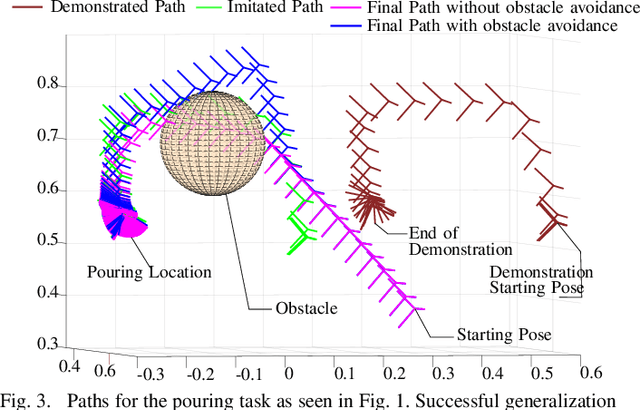
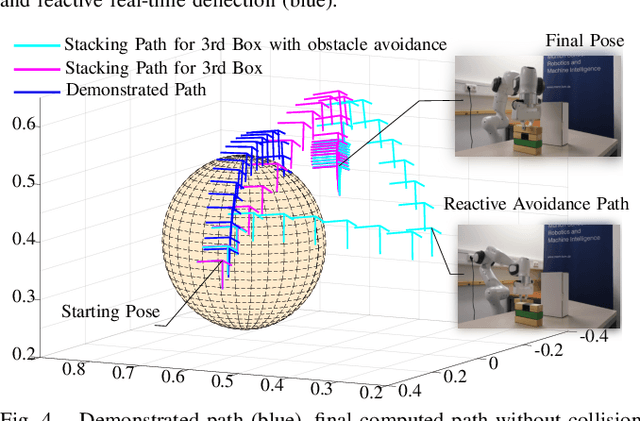
As collaborative robots move closer to human environments, motion generation and reactive planning strategies that allow for elaborate task execution with minimal easy-to-implement guidance whilst coping with changes in the environment is of paramount importance. In this paper, we present a novel approach for generating real-time motion plans for point-to-point tasks using a single successful human demonstration. Our approach is based on screw linear interpolation,which allows us to respect the underlying geometric constraints that characterize the task and are implicitly present in the demonstration. We also integrate an original reactive collision avoidance approach with our planner. We present extensive experimental results to demonstrate that with our approach,by using a single demonstration of moving one block, we can generate motion plans for complex tasks like stacking multiple blocks (in a dynamic environment). Analogous generalization abilities are also shown for tasks like pouring and loading shelves. For the pouring task, we also show that a demonstration given for one-armed pouring can be used for planning pouring with a dual-armed manipulator of different kinematic structure.
Fine-Grained Representation Learning and Recognition by Exploiting Hierarchical Semantic Embedding
Aug 14, 2018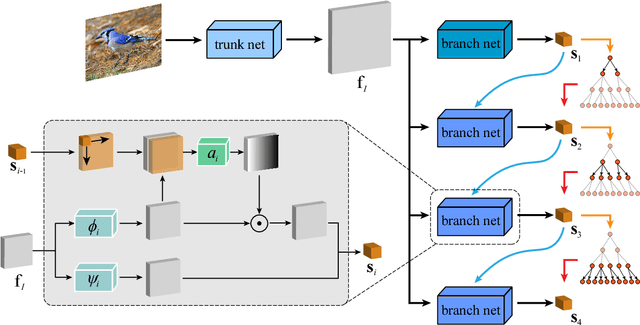
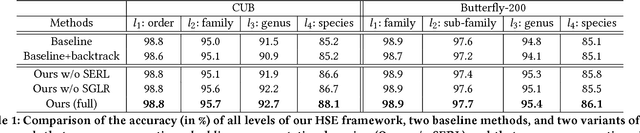
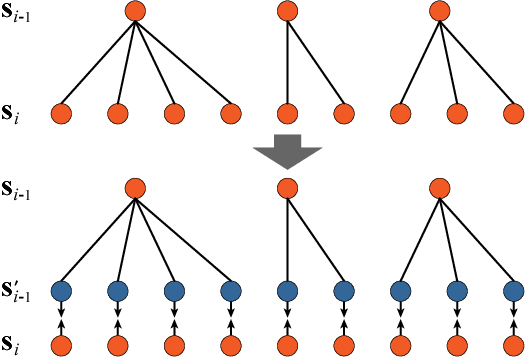
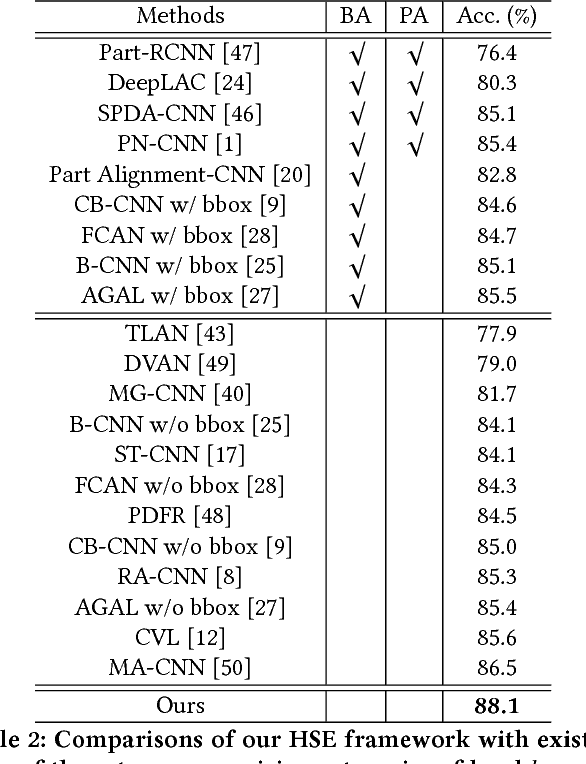
Object categories inherently form a hierarchy with different levels of concept abstraction, especially for fine-grained categories. For example, birds (Aves) can be categorized according to a four-level hierarchy of order, family, genus, and species. This hierarchy encodes rich correlations among various categories across different levels, which can effectively regularize the semantic space and thus make prediction less ambiguous. However, previous studies of fine-grained image recognition primarily focus on categories of one certain level and usually overlook this correlation information. In this work, we investigate simultaneously predicting categories of different levels in the hierarchy and integrating this structured correlation information into the deep neural network by developing a novel Hierarchical Semantic Embedding (HSE) framework. Specifically, the HSE framework sequentially predicts the category score vector of each level in the hierarchy, from highest to lowest. At each level, it incorporates the predicted score vector of the higher level as prior knowledge to learn finer-grained feature representation. During training, the predicted score vector of the higher level is also employed to regularize label prediction by using it as soft targets of corresponding sub-categories. To evaluate the proposed framework, we organize the 200 bird species of the Caltech-UCSD birds dataset with the four-level category hierarchy and construct a large-scale butterfly dataset that also covers four level categories. Extensive experiments on these two and the newly-released VegFru datasets demonstrate the superiority of our HSE framework over the baseline methods and existing competitors.