 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to Attend: A Principled Vision-Centric Position Encoding with Parabolas
Feb 01, 2026We propose Parabolic Position Encoding (PaPE), a parabola-based position encoding for vision modalities in attention-based architectures. Given a set of vision tokens-such as images, point clouds, videos, or event camera streams-our objective is to encode their positions while accounting for the characteristics of vision modalities. Prior works have largely extended position encodings from 1D-sequences in language to nD-structures in vision, but only with partial account of vision characteristics. We address this gap by designing PaPE from principles distilled from prior work: translation invariance, rotation invariance (PaPE-RI), distance decay, directionality, and context awareness. We evaluate PaPE on 8 datasets that span 4 modalities. We find that either PaPE or PaPE-RI achieves the top performance on 7 out of 8 datasets. Extrapolation experiments on ImageNet-1K show that PaPE extrapolates remarkably well, improving in absolute terms by up to 10.5% over the next-best position encoding. Code is available at https://github.com/DTU-PAS/parabolic-position-encoding.
The First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
Unifying Complementarity Constraints and Control Barrier Functions for Safe Whole-Body Robot Control
Apr 24, 2025Safety-critical whole-body robot control demands reactive methods that ensure collision avoidance in real-time. Complementarity constraints and control barrier functions (CBF) have emerged as core tools for ensuring such safety constraints, and each represents a well-developed field. Despite addressing similar problems, their connection remains largely unexplored. This paper bridges this gap by formally proving the equivalence between these two methodologies for sampled-data, first-order systems, considering both single and multiple constraint scenarios. By demonstrating this equivalence, we provide a unified perspective on these techniques. This unification has theoretical and practical implications, facilitating the cross-application of robustness guarantees and algorithmic improvements between complementarity and CBF frameworks. We discuss these synergistic benefits and motivate future work in the comparison of the methods in more general cases.
Data-augmented Learning of Geodesic Distances in Irregular Domains through Soner Boundary Conditions
Mar 06, 2025Geodesic distances play a fundamental role in robotics, as they efficiently encode global geometric information of the domain. Recent methods use neural networks to approximate geodesic distances by solving the Eikonal equation through physics-informed approaches. While effective, these approaches often suffer from unstable convergence during training in complex environments. We propose a framework to learn geodesic distances in irregular domains by using the Soner boundary condition, and systematically evaluate the impact of data losses on training stability and solution accuracy. Our experiments demonstrate that incorporating data losses significantly improves convergence robustness, reducing training instabilities and sensitivity to initialization. These findings suggest that hybrid data-physics approaches can effectively enhance the reliability of learning-based geodesic distance solvers with sparse data.
Co-Designing Tools and Control Policies for Robust Manipulation
Sep 17, 2024Inherent robustness in manipulation is prevalent in biological systems and critical for robotic manipulation systems due to real-world uncertainties and disturbances. This robustness relies not only on robust control policies but also on the design characteristics of the end-effectors. This paper introduces a bi-level optimization approach to co-designing tools and control policies to achieve robust manipulation. The approach employs reinforcement learning for lower-level control policy learning and multi-task Bayesian optimization for upper-level design optimization. Diverging from prior approaches, we incorporate caging-based robustness metrics into both levels, ensuring manipulation robustness against disturbances and environmental variations. Our method is evaluated in four non-prehensile manipulation environments, demonstrating improvements in task success rate under disturbances and environment changes. A real-world experiment is also conducted to validate the framework's practical effectiveness.
Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions
Sep 16, 2024


Velocity Obstacles (VO) methods form a paradigm for collision avoidance strategies among moving obstacles and agents. While VO methods perform well in simple multi-agent environments, they don't guarantee safety and can show overly conservative behavior in common situations. In this paper, we propose to combine a VO-strategy for guidance with a CBF-approach for safety, which overcomes the overly conservative behavior of VOs and formally guarantees safety. We validate our method in a baseline comparison study, using 2nd order integrator and car-like dynamics. Results support that our method outperforms the baselines w.r.t. path smoothness, collision avoidance, and success rates.
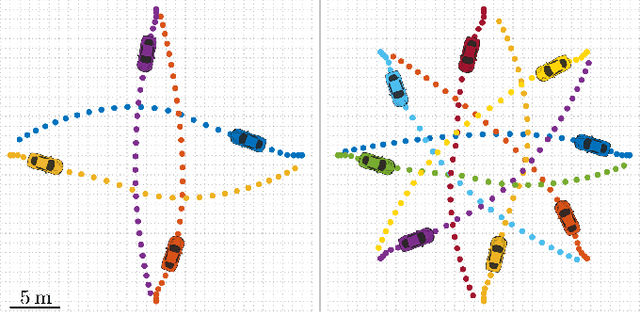
Forward Invariance in Trajectory Spaces for Safety-critical Control
Jul 17, 2024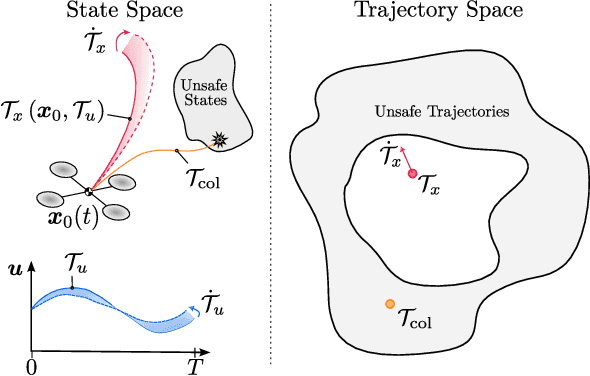
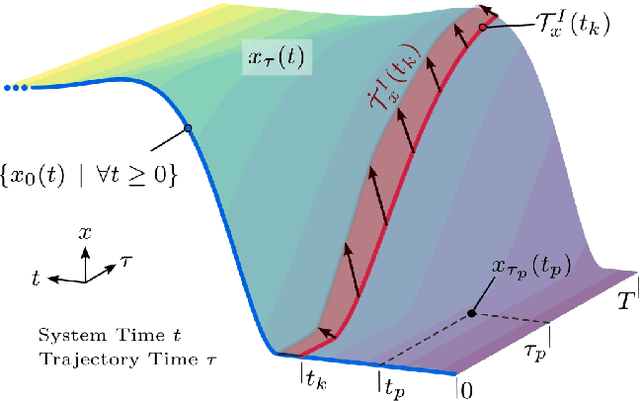
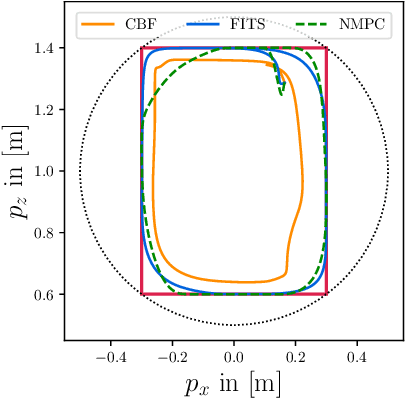
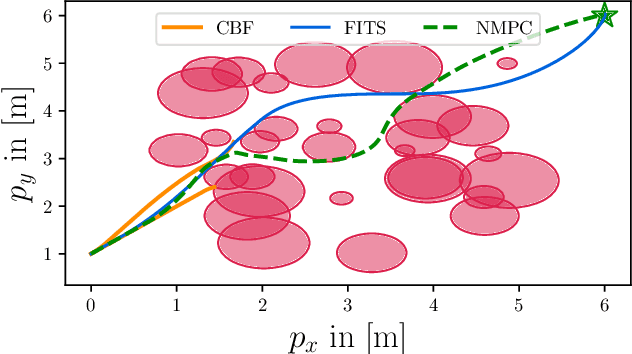
Useful robot control algorithms should not only achieve performance objectives but also adhere to hard safety constraints. Control Barrier Functions (CBFs) have been developed to provably ensure system safety through forward invariance. However, they often unnecessarily sacrifice performance for safety since they are purely reactive. Receding horizon control (RHC), on the other hand, consider planned trajectories to account for the future evolution of a system. This work provides a new perspective on safety-critical control by introducing Forward Invariance in Trajectory Spaces (FITS). We lift the problem of safe RHC into the trajectory space and describe the evolution of planned trajectories as a controlled dynamical system. Safety constraints defined over states can be converted into sets in the trajectory space which we render forward invariant via a CBF framework. We derive an efficient quadratic program (QP) to synthesize trajectories that provably satisfy safety constraints. Our experiments support that FITS improves the adherence to safety specifications without sacrificing performance over alternative CBF and NMPC methods.
Adaptive Distance Functions via Kelvin Transformation
Jun 05, 2024The term safety in robotics is often understood as a synonym for avoidance. Although this perspective has led to progress in path planning and reactive control, a generalization of this perspective is necessary to include task semantics relevant to contact-rich manipulation tasks, especially during teleoperation and to ensure the safety of learned policies. We introduce the semantics-aware distance function and a corresponding computational method based on the Kelvin Transformation. The semantics-aware distance generalizes signed distance functions by allowing the zero level set to lie inside of the object in regions where contact is allowed, effectively incorporating task semantics -- such as object affordances and user intent -- in an adaptive implicit representation of safe sets. In validation experiments we show the capability of our method to adapt to time-varying semantic information, and to perform queries in sub-microsecond, enabling applications in reinforcement learning, trajectory optimization, and motion planning.
Walk on Spheres for PDE-based Path Planning
Jun 03, 2024In this paper, we investigate the Walk on Spheres algorithm (WoS) for motion planning in robotics. WoS is a Monte Carlo method to solve the Dirichlet problem developed in the 50s by Muller and has recently been repopularized by Sawhney and Crane, who showed its applicability for geometry processing in volumetric domains. This paper provides a first study into the applicability of WoS for robot motion planning in configuration spaces, with potential fields defined as the solution of screened Poisson equations. The experiments in this paper empirically indicate the method's trivial parallelization, its dimension-independent convergence characteristic of $O(1/N)$ in the number of walks, and a validation experiment on the RR platform.
A Solution to Slosh-free Robot Trajectory Optimization
Oct 23, 2022This paper is about fast slosh free fluid transportation. Existing approaches are either computationally heavy or only suitable for specific robots and container shapes. We model the end effector as a point mass suspended by a spherical pendulum and study the requirements for slosh free motion and the validity of the point mass model. In this approach, slosh free trajectories are generated by controlling the pendulum's pivot and simulating the motion of the point mass. We cast the trajectory optimization problem as a quadratic program; this strategy can be used to obtain valid control inputs. Through simulations and experiments on a 7 DoF Franka Emika Panda robot we validate the effectiveness of the proposed approach.