Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions
Paper and Code
Sep 16, 2024


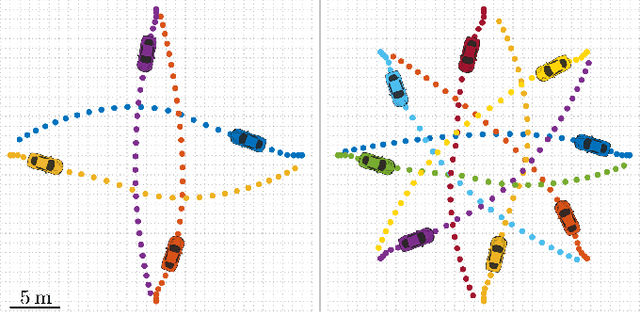
Velocity Obstacles (VO) methods form a paradigm for collision avoidance strategies among moving obstacles and agents. While VO methods perform well in simple multi-agent environments, they don't guarantee safety and can show overly conservative behavior in common situations. In this paper, we propose to combine a VO-strategy for guidance with a CBF-approach for safety, which overcomes the overly conservative behavior of VOs and formally guarantees safety. We validate our method in a baseline comparison study, using 2nd order integrator and car-like dynamics. Results support that our method outperforms the baselines w.r.t. path smoothness, collision avoidance, and success rates.
View paper on