 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of Fully Actuated Aerial Vehicles: A Comparison of Model-based and Sensor-based Dynamic Inversion
May 12, 2026Fully actuated multirotor platforms decouple translational force generation from vehicle attitude, enabling independent control of position and orientation and shifting performance limitations from attitude authority to actuator dynamics and control effectiveness. This paper compares a model-based nonlinear dynamic inversion controller (geometric NDI) with a sensor-based incremental dynamic inversion controller (INDI) on a fixed-tilt fully actuated hexarotor. Both controllers share an identical outer-loop structure and are both executed at 500 Hz; therefore, performance differences can be attributed primarily to the inversion strategy. Controller performance is evaluated in five experiments covering attitude step tracking under nominal conditions and under a 50% mismatch in the rotor force coefficient, hover disturbance rejection under an external lateral load, waypoint tracking in the presence of wind gust disturbances, reduced control frequency, and injected sensor degradation. The results show that INDI offers clear advantages under parameter mismatch, gust disturbances, and sensor degradation, and maintains lower position errors across the controller-frequency sweep. However, its advantages are not universal: geometric NDI yields better attitude tracking at reduced control frequencies. To the authors' best knowledge, this work presents the first experimental validation of a full pose tracking INDI controller with decoupled translational and rotational dynamics. These findings highlight the trade-off between measurement-based and model-based inversion for robust control and rapid deployment of fully actuated UAVs.
ADMM-based Continuous Trajectory Optimization in Graphs of Convex Sets
Mar 11, 2026This paper presents a numerical solver for computing continuous trajectories in non-convex environments. Our approach relies on a customized implementation of the Alternating Direction Method of Multipliers (ADMM) built upon two key components: First, we parameterize trajectories as polynomials, allowing the primal update to be computed in closed form as a minimum-control-effort problem. Second, we introduce the concept of a spatio-temporal allocation graph based on a mixed-integer formulation and pose the slack update as a shortest-path search. The combination of these ingredients results in a solver with several distinct advantages over the state of the art. By jointly optimizing over both discrete spatial and continuous temporal domains, our method accesses a larger search space than existing decoupled approaches, enabling the discovery of superior trajectories. Additionally, the solver's structural robustness ensures reliable convergence from naive initializations, removing the bottleneck of complex warm starting in non-convex environments.
Learning Robust Agile Flight Control with Stability Guarantees
Oct 14, 2025In the evolving landscape of high-speed agile quadrotor flight, achieving precise trajectory tracking at the platform's operational limits is paramount. Controllers must handle actuator constraints, exhibit robustness to disturbances, and remain computationally efficient for safety-critical applications. In this work, we present a novel neural-augmented feedback controller for agile flight control. The controller addresses individual limitations of existing state-of-the-art control paradigms and unifies their strengths. We demonstrate the controller's capabilities, including the accurate tracking of highly aggressive trajectories that surpass the feasibility of the actuators. Notably, the controller provides universal stability guarantees, enhancing its robustness and tracking performance even in exceedingly disturbance-prone settings. Its nonlinear feedback structure is highly efficient enabling fast computation at high update rates. Moreover, the learning process in simulation is both fast and stable, and the controller's inherent robustness allows direct deployment to real-world platforms without the need for training augmentations or fine-tuning.
PHODCOS: Pythagorean Hodograph-based Differentiable Coordinate System
Oct 10, 2024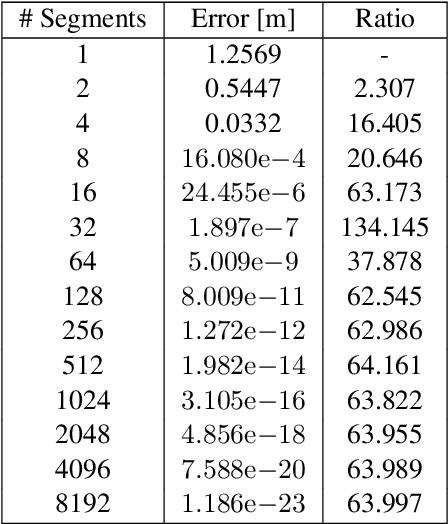
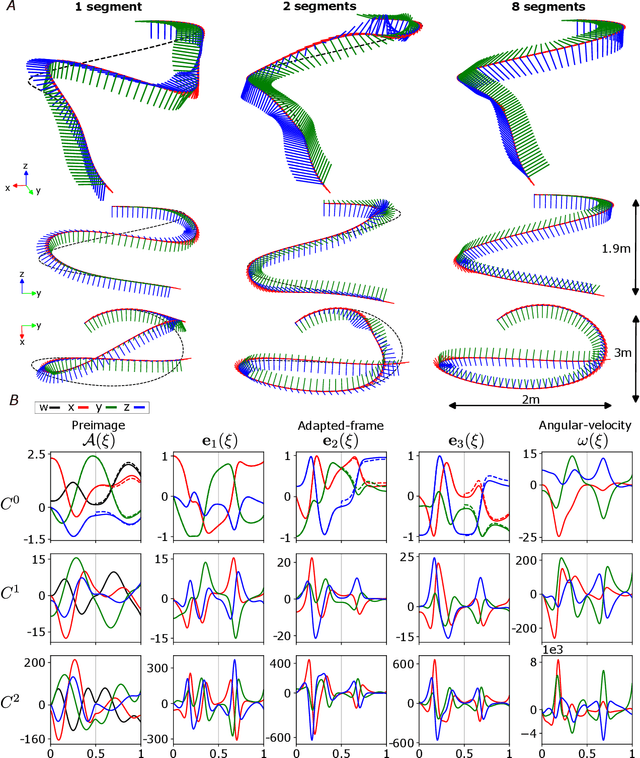
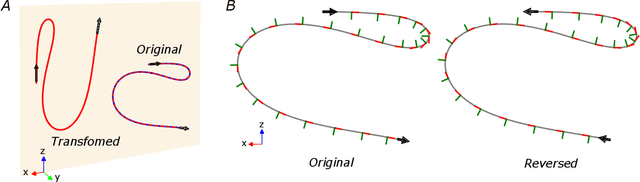
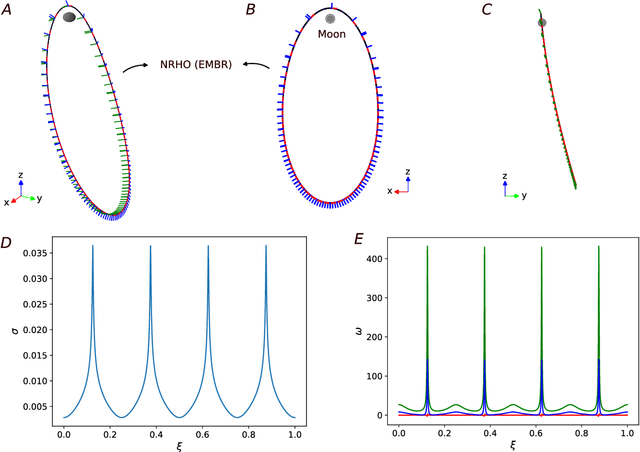
This paper presents PHODCOS, an algorithm that assigns a moving coordinate system to a given curve. The parametric functions underlying the coordinate system, i.e., the path function, the moving frame and its angular velocity, are exact -- approximation free -- differentiable, and sufficiently continuous. This allows for computing a coordinate system for highly nonlinear curves, while remaining compliant with autonomous navigation algorithms that require first and second order gradient information. In addition, the coordinate system obtained by PHODCOS is fully defined by a finite number of coefficients, which may then be used to compute additional geometric properties of the curve, such as arc-length, curvature, torsion, etc. Therefore, PHODCOS presents an appealing paradigm to enhance the geometrical awareness of existing guidance and navigation on-orbit spacecraft maneuvers. The PHODCOS algorithm is presented alongside an analysis of its error and approximation order, and thus, it is guaranteed that the obtained coordinate system matches the given curve within a desired tolerance. To demonstrate the applicability of the coordinate system resulting from PHODCOS, we present numerical examples in the Near Rectilinear Halo Orbit (NRHO) for the Lunar Gateway.
A Universal Formulation for Path-Parametric Planning and Control
Oct 07, 2024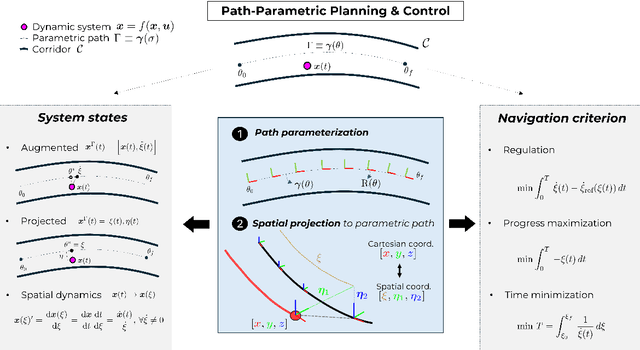
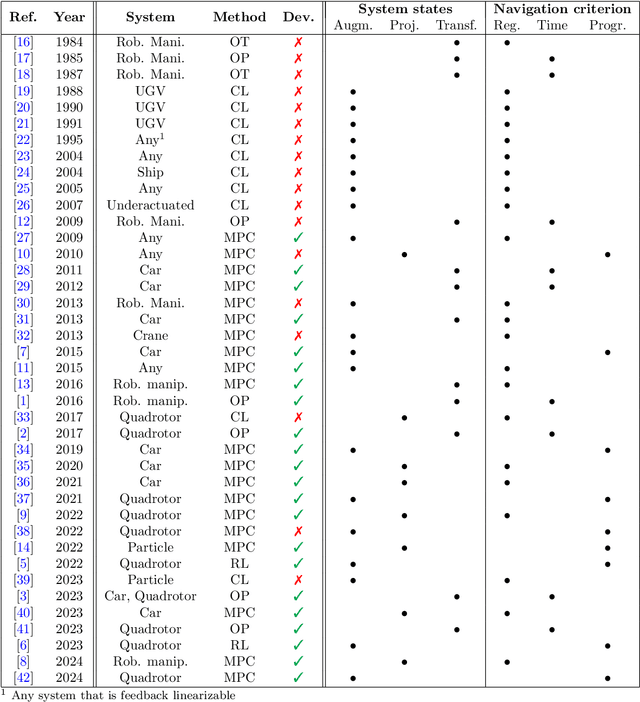
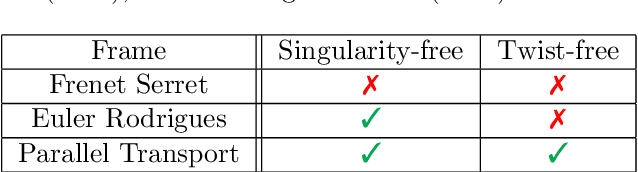
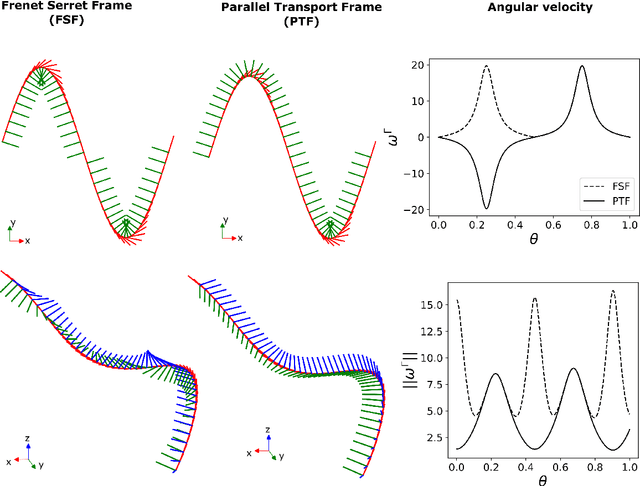
This work presents a unified framework for path-parametric planning and control. This formulation is universal as it standardizes the entire spectrum of path-parametric techniques -- from traditional path following to more recent contouring or progress-maximizing Model Predictive Control and Reinforcement Learning -- under a single framework. The ingredients underlying this universality are twofold: First, we present a compact and efficient technique capable of computing singularity-free, smooth and differentiable moving frames. Second, we derive a spatial path parameterization of the Cartesian coordinates applicable to any arbitrary curve without prior assumptions on its parametric speed or moving frame, and that perfectly interplays with the aforementioned path parameterization method. The combination of these two ingredients leads to a planning and control framework that brings togehter existing path-parametric techniques in literature. Aiming to unify all these approaches, we open source PACOR, a software library that implements the presented content, thereby providing a self-contained toolkit for the formulation of path-parametric planning and control methods.
Differentiable Collision-Free Parametric Corridors
Jul 17, 2024



This paper presents a method to compute differentiable collision-free parametric corridors. In contrast to existing solutions that decompose the obstacle-free space into multiple convex sets, the continuous corridors computed by our method are smooth and differentiable, making them compatible with existing numerical techniques for learning and optimization. To achieve this, we represent the collision-free corridors as a path-parametric off-centered ellipse with a polynomial basis. We show that the problem of maximizing the volume of such corridors is convex, and can be efficiently solved. To assess the effectiveness of the proposed method, we examine its performance in a synthetic case study and subsequently evaluate its applicability in a real-world scenario from the KITTI dataset.
Dual Quaternion Control of UAVs with Cable-suspended Load
Apr 11, 2024Modeling the kinematics and dynamics of robotics systems with suspended loads using dual quaternions has not been explored so far. This paper introduces a new innovative control strategy using dual quaternions for UAVs with cable-suspended loads, focusing on the sling load lifting and tracking problems. By utilizing the mathematical efficiency and compactness of dual quaternions, a unified representation of the UAV and its suspended load's dynamics and kinematics is achieved, facilitating the realization of load lifting and trajectory tracking. The simulation results have tested the proposed strategy's accuracy, efficiency, and robustness. This study makes a substantial contribution to present this novel control strategy that harnesses the benefits of dual quaternions for cargo UAVs. Our work also holds promise for inspiring future innovations in under-actuated systems control using dual quaternions.
Scene-Graph ViT: End-to-End Open-Vocabulary Visual Relationship Detection
Mar 21, 2024



Visual relationship detection aims to identify objects and their relationships in images. Prior methods approach this task by adding separate relationship modules or decoders to existing object detection architectures. This separation increases complexity and hinders end-to-end training, which limits performance. We propose a simple and highly efficient decoder-free architecture for open-vocabulary visual relationship detection. Our model consists of a Transformer-based image encoder that represents objects as tokens and models their relationships implicitly. To extract relationship information, we introduce an attention mechanism that selects object pairs likely to form a relationship. We provide a single-stage recipe to train this model on a mixture of object and relationship detection data. Our approach achieves state-of-the-art relationship detection performance on Visual Genome and on the large-vocabulary GQA benchmark at real-time inference speeds. We provide analyses of zero-shot performance, ablations, and real-world qualitative examples.
Geometric Slosh-Free Tracking for Robotic Manipulators
Feb 07, 2024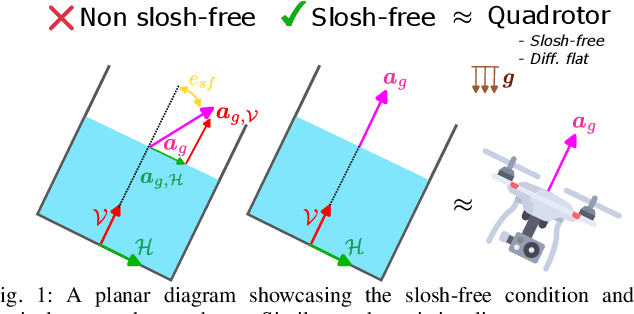
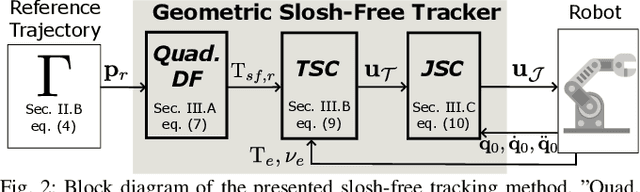
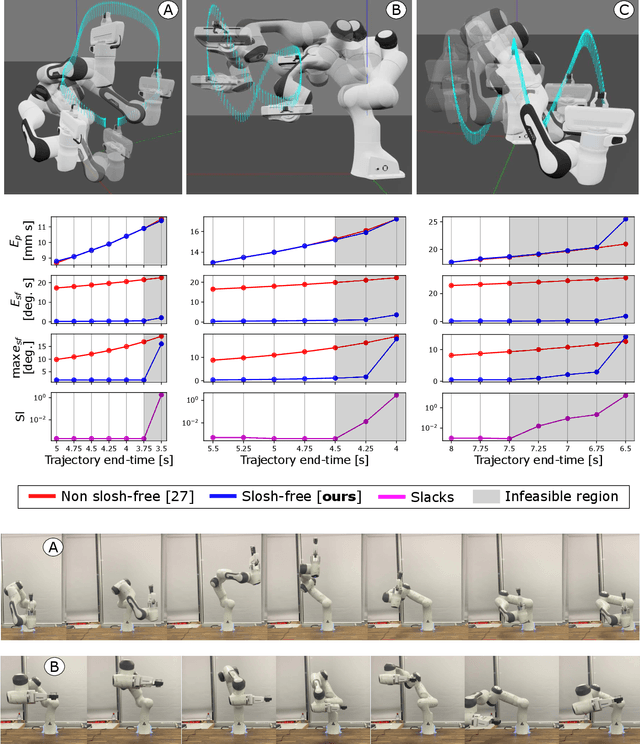
This work focuses on the agile transportation of liquids with robotic manipulators. In contrast to existing methods that are either computationally heavy, system/container specific or dependant on a singularity-prone pendulum model, we present a real-time slosh-free tracking technique. This method solely requires the reference trajectory and the robot's kinematic constraints to output kinematically feasible joint space commands. The crucial element underlying this approach consists on mimicking the end-effector's motion through a virtual quadrotor, which is inherently slosh-free and differentially flat, thereby allowing us to calculate a slosh-free reference orientation. Through the utilization of a cascaded proportional-derivative (PD) controller, this slosh-free reference is transformed into task space acceleration commands, which, following the resolution of a Quadratic Program (QP) based on Resolved Acceleration Control (RAC), are translated into a feasible joint configuration. The validity of the proposed approach is demonstrated by simulated and real-world experiments on a 7 DoF Franka Emika Panda robot. Code: https://github.com/jonarriza96/gsft Video: https://youtu.be/4kitqYVS9n8
Learning for CasADi: Data-driven Models in Numerical Optimization
Dec 10, 2023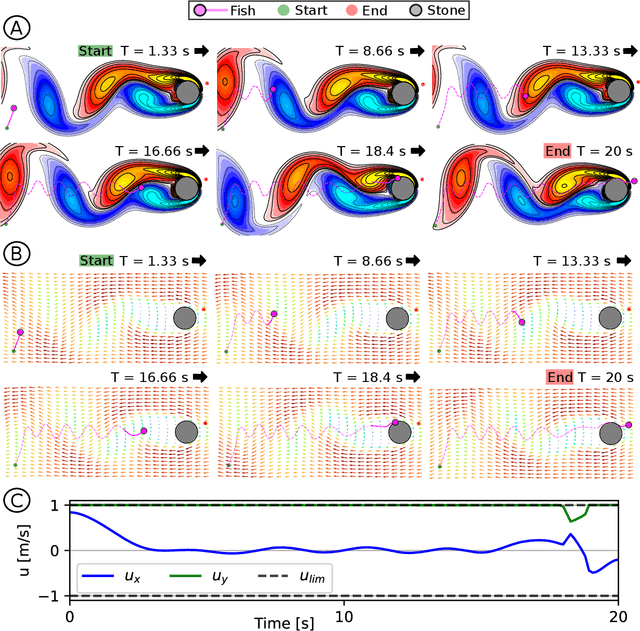
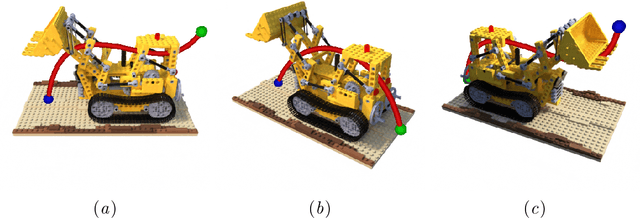
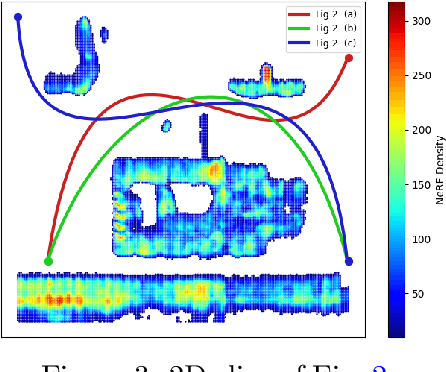
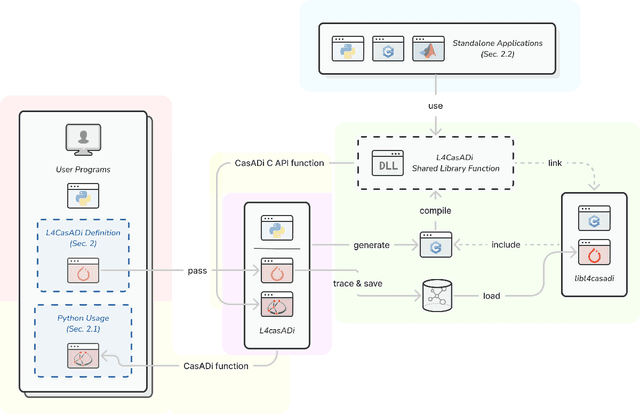
While real-world problems are often challenging to analyze analytically, deep learning excels in modeling complex processes from data. Existing optimization frameworks like CasADi facilitate seamless usage of solvers but face challenges when integrating learned process models into numerical optimizations. To address this gap, we present the Learning for CasADi (L4CasADi) framework, enabling the seamless integration of PyTorch-learned models with CasADi for efficient and potentially hardware-accelerated numerical optimization. The applicability of L4CasADi is demonstrated with two tutorial examples: First, we optimize a fish's trajectory in a turbulent river for energy efficiency where the turbulent flow is represented by a PyTorch model. Second, we demonstrate how an implicit Neural Radiance Field environment representation can be easily leveraged for optimal control with L4CasADi. L4CasADi, along with examples and documentation, is available under MIT license at https://github.com/Tim-Salzmann/l4casadi