 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTinySDP: Real Time Semidefinite Optimization for Certifiable and Agile Edge Robotics
May 13, 2026Semidefinite programming (SDP) provides a principled framework for convex relaxations of nonconvex geometric constraints in motion planning, yet existing solvers are too computationally expensive for real-time control, particularly on resource-constrained embedded systems. To address this gap, we introduce TinySDP, the first semidefinite programming solver designed for embedded systems, enabling real-time model-predictive control (MPC) on microcontrollers for problems with nonconvex obstacle constraints. Our approach integrates positive-semidefinite cone projections into a cached-Riccati-based ADMM solver, leveraging computational structure for embedded tractability. We pair this solver with an a posteriori rank-1 certificate that converts relaxed solutions into explicit geometric guarantees at each timestep. On challenging benchmarks, e.g., cul-de-sac and dynamic obstacle avoidance scenarios that induce failures in local methods, TinySDP achieves collision-free navigation with up to 73% shorter paths than state-of-the-art baselines. We validate our approach on a Crazyflie quadrotor, demonstrating that semidefinite constraints can be enforced at real-time rates for agile embedded robotics.
Convex Maneuver Planning for Spacecraft Collision Avoidance
Oct 21, 2025Conjunction analysis and maneuver planning for spacecraft collision avoidance remains a manual and time-consuming process, typically involving repeated forward simulations of hand-designed maneuvers. With the growing density of satellites in low-Earth orbit (LEO), autonomy is becoming essential for efficiently evaluating and mitigating collisions. In this work, we present an algorithm to design low-thrust collision-avoidance maneuvers for short-term conjunction events. We first formulate the problem as a nonconvex quadratically-constrained quadratic program (QCQP), which we then relax into a convex semidefinite program (SDP) using Shor's relaxation. We demonstrate empirically that the relaxation is tight, which enables the recovery of globally optimal solutions to the original nonconvex problem. Our formulation produces a minimum-energy solution while ensuring a desired probability of collision at the time of closest approach. Finally, if the desired probability of collision cannot be satisfied, we relax this constraint into a penalty, yielding a minimum-risk solution. We validate our algorithm with a high-fidelity simulation of a satellite conjunction in low-Earth orbit with a simulated conjunction data message (CDM), demonstrating its effectiveness in reducing collision risk.
PHODCOS: Pythagorean Hodograph-based Differentiable Coordinate System
Oct 10, 2024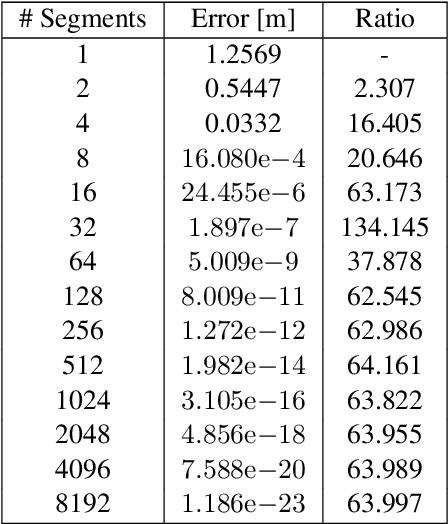
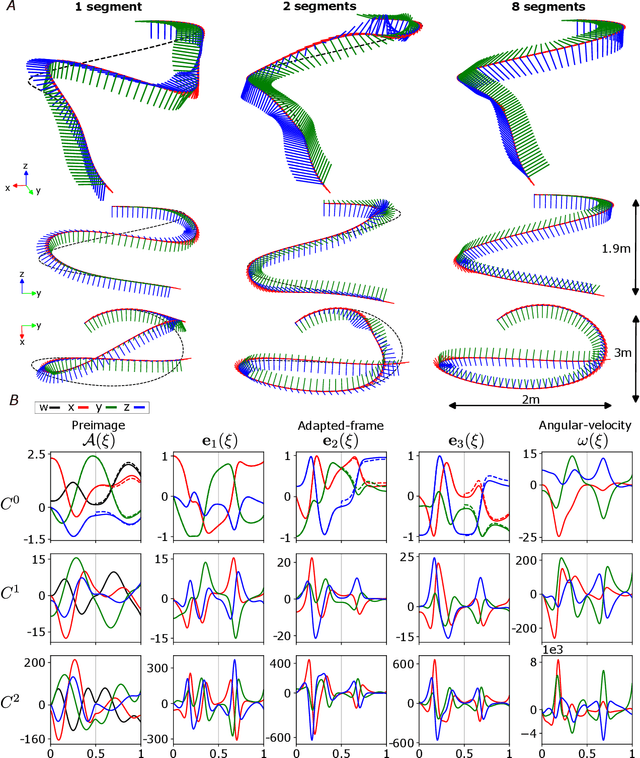
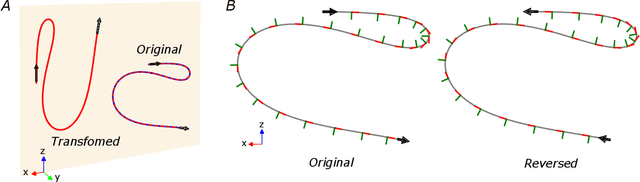
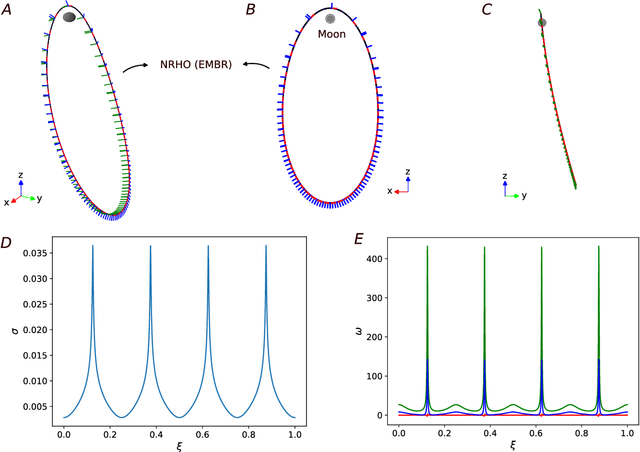
This paper presents PHODCOS, an algorithm that assigns a moving coordinate system to a given curve. The parametric functions underlying the coordinate system, i.e., the path function, the moving frame and its angular velocity, are exact -- approximation free -- differentiable, and sufficiently continuous. This allows for computing a coordinate system for highly nonlinear curves, while remaining compliant with autonomous navigation algorithms that require first and second order gradient information. In addition, the coordinate system obtained by PHODCOS is fully defined by a finite number of coefficients, which may then be used to compute additional geometric properties of the curve, such as arc-length, curvature, torsion, etc. Therefore, PHODCOS presents an appealing paradigm to enhance the geometrical awareness of existing guidance and navigation on-orbit spacecraft maneuvers. The PHODCOS algorithm is presented alongside an analysis of its error and approximation order, and thus, it is guaranteed that the obtained coordinate system matches the given curve within a desired tolerance. To demonstrate the applicability of the coordinate system resulting from PHODCOS, we present numerical examples in the Near Rectilinear Halo Orbit (NRHO) for the Lunar Gateway.
A Deep Learning Approach To Multi-Context Socially-Aware Navigation
Apr 20, 2021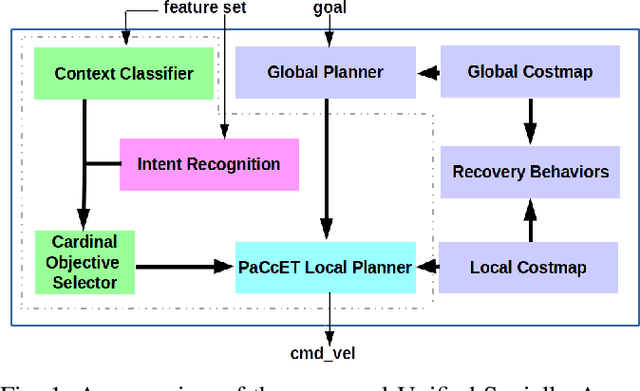
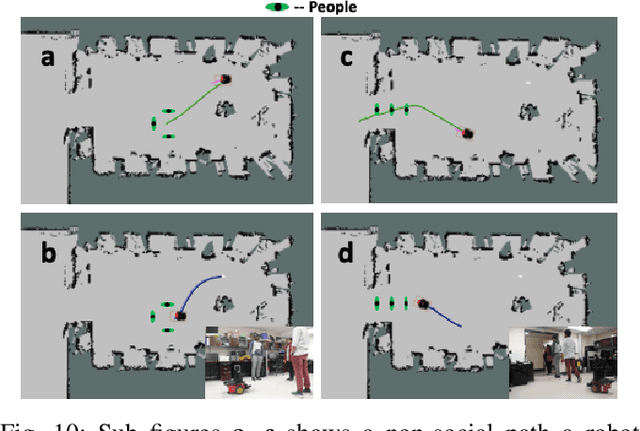

We present a context classification pipeline to allow a robot to change its navigation strategy based on the observed social scenario. Socially-Aware Navigation considers social behavior in order to improve navigation around people. Most of the existing research uses different techniques to incorporate social norms into robot path planning for a single context. Methods that work for hallway behavior might not work for approaching people, and so on. We developed a high-level decision-making subsystem, a model-based context classifier, and a multi-objective optimization-based local planner to achieve socially-aware trajectories for autonomously sensed contexts. Using a context classification system, the robot can select social objectives that are later used by Pareto Concavity Elimination Transformation (PaCcET) based local planner to generate safe, comfortable, and socially-appropriate trajectories for its environment. This was tested and validated in multiple environments on a Pioneer mobile robot platform; results show that the robot was able to select and account for social objectives related to navigation autonomously.