 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach To Multi-Context Socially-Aware Navigation
Apr 20, 2021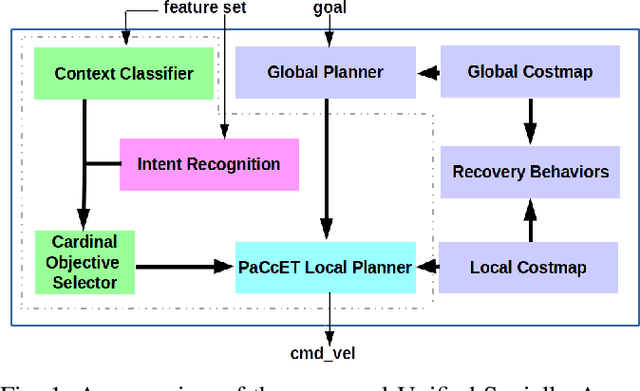

We present a context classification pipeline to allow a robot to change its navigation strategy based on the observed social scenario. Socially-Aware Navigation considers social behavior in order to improve navigation around people. Most of the existing research uses different techniques to incorporate social norms into robot path planning for a single context. Methods that work for hallway behavior might not work for approaching people, and so on. We developed a high-level decision-making subsystem, a model-based context classifier, and a multi-objective optimization-based local planner to achieve socially-aware trajectories for autonomously sensed contexts. Using a context classification system, the robot can select social objectives that are later used by Pareto Concavity Elimination Transformation (PaCcET) based local planner to generate safe, comfortable, and socially-appropriate trajectories for its environment. This was tested and validated in multiple environments on a Pioneer mobile robot platform; results show that the robot was able to select and account for social objectives related to navigation autonomously.
Socially-Aware Navigation: A Non-linear Multi-Objective Optimization Approach
Nov 11, 2019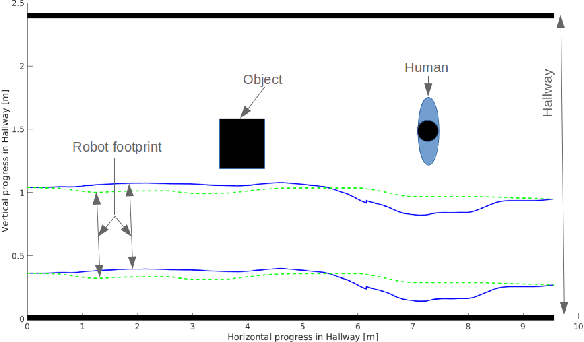
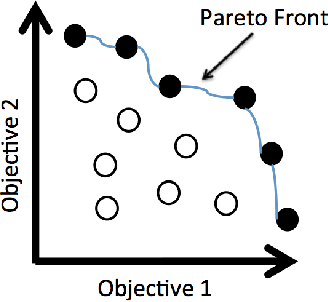
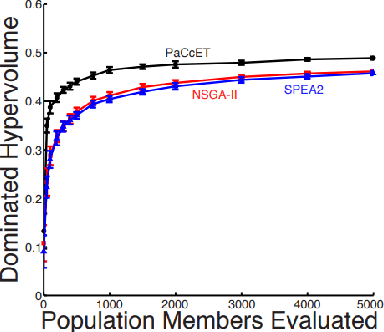
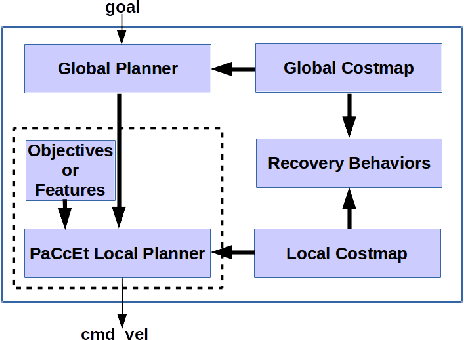
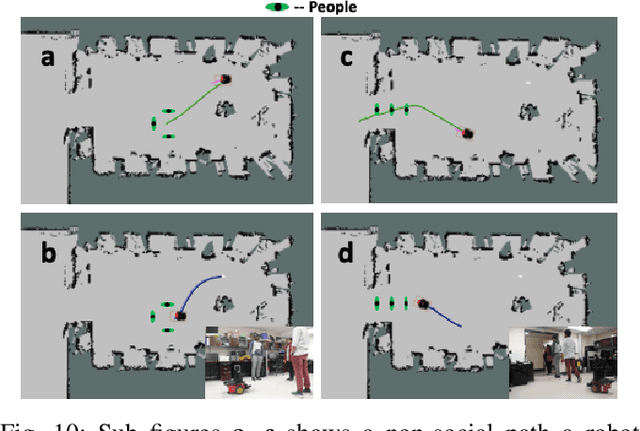
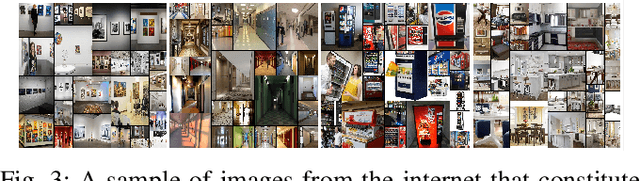
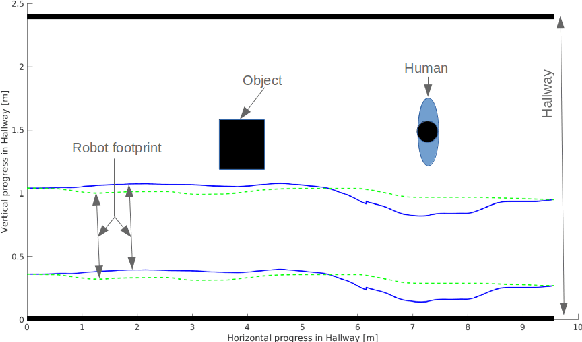
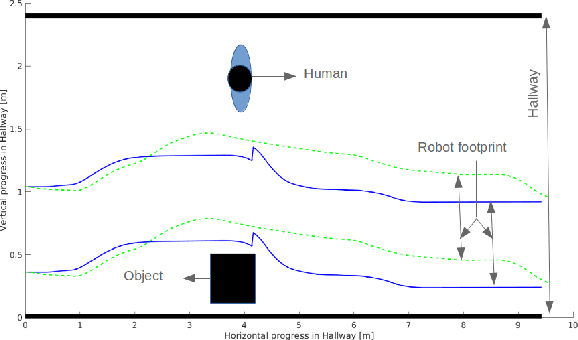
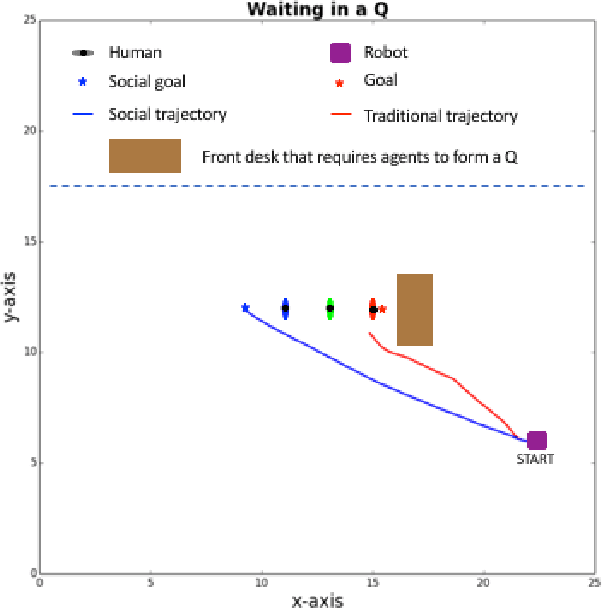
Mobile robots are increasingly populating homes, hospitals, shopping malls, factory floors, and other human environments. Human society has social norms that people mutually accept, obeying these norms is an essential signal that someone is participating socially with respect to the rest of the population. For robots to be socially compatible with humans, it is crucial for robots to obey these social norms. In prior work, we demonstrated a Socially-Aware Navigation (SAN) planner, based on Pareto Concavity Elimination Transformation (PaCcET), in a hallway scenario, optimizing two objectives so that the robot does not invade the personal space of people. In this paper, we extend our PaCcET based SAN planner to multiple scenarios with more than two objectives. We modified the Robot Operating System's (ROS) navigation stack to include PaCcET in the local planning task. We show that our approach can accommodate multiple Human-Robot Interaction (HRI) scenarios. Using the proposed approach, we were able to achieve successful HRI in multiple scenarios like hallway interactions, an art gallery, waiting in a queue, and interacting with a group. We implemented our method on a simulated PR2 robot in a 2D simulator (Stage) and a pioneer-3DX mobile robot in the real-world to validate all the scenarios. A comprehensive set of experiments shows that our approach can handle multiple interaction scenarios on both holonomic and non-holonomic robots; hence, it can be a viable option for a Unified Socially-Aware Navigation (USAN).
Towards a Unified Planner For Socially-Aware Navigation
Oct 11, 2018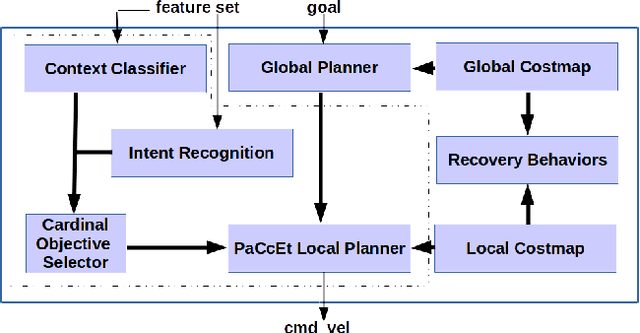
This paper presents the framework for a novel Unified Socially-Aware Navigation (USAN) architecture and explains its need in Socially Assistive Robotics (SAR) applications. Our approach emphasizes interpersonal distance and how spatial communication can be used to build a unified planner for a human-robot collaborative environment. Socially-Aware Navigation (SAN) is vital for helping humans to feel comfortable and safe around robots; HRI studies have shown the importance of SAN transcends safety and comfort. SAN plays a crucial role in perceived intelligence, sociability and social capacity of the robot, thereby increasing the acceptance of the robots in public places. Human environments are very dynamic and pose serious social challenges to robots intended for interactions with people. For the robots to cope with the changing dynamics of a situation, there is a need to infer intent and detect changes in the interaction context. SAN has gained immense interest in the social robotics community; to the best of our knowledge, however, there is no planner that can adapt to different interaction contexts spontaneously after autonomously sensing the context. Most of the recent efforts involve social path planning for a single context. In this work, we propose a novel approach for a unified architecture to SAN that can plan and execute trajectories for an autonomously sensed interaction context that are human-friendly. Our approach augments the navigation stack of the Robot Operating System (ROS) utilizing machine learning and optimization tools. We modified the ROS navigation stack using a machine learning-based context classifier and a PaCcET based local planner for us to achieve the goals of USAN. We discuss our preliminary results and concrete plans on putting the pieces together in achieving USAN.