 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially-Aware Navigation: A Non-linear Multi-Objective Optimization Approach
Nov 11, 2019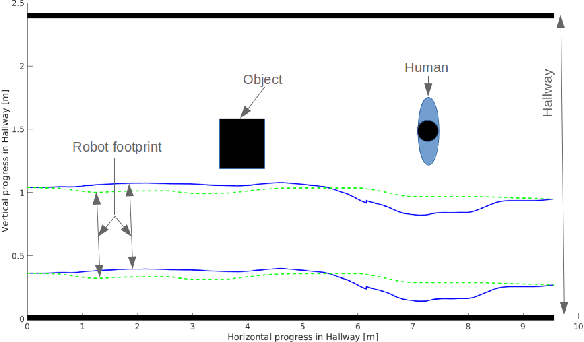
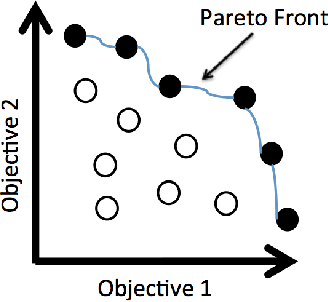
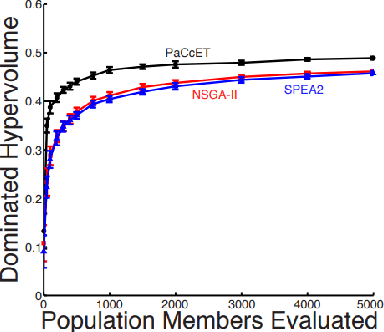
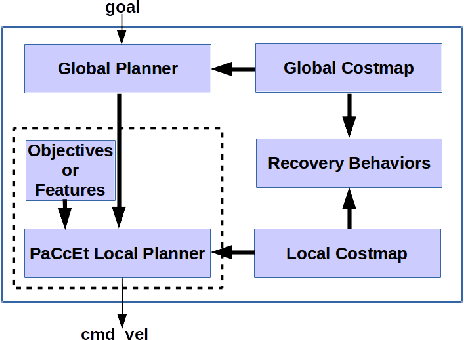
Mobile robots are increasingly populating homes, hospitals, shopping malls, factory floors, and other human environments. Human society has social norms that people mutually accept, obeying these norms is an essential signal that someone is participating socially with respect to the rest of the population. For robots to be socially compatible with humans, it is crucial for robots to obey these social norms. In prior work, we demonstrated a Socially-Aware Navigation (SAN) planner, based on Pareto Concavity Elimination Transformation (PaCcET), in a hallway scenario, optimizing two objectives so that the robot does not invade the personal space of people. In this paper, we extend our PaCcET based SAN planner to multiple scenarios with more than two objectives. We modified the Robot Operating System's (ROS) navigation stack to include PaCcET in the local planning task. We show that our approach can accommodate multiple Human-Robot Interaction (HRI) scenarios. Using the proposed approach, we were able to achieve successful HRI in multiple scenarios like hallway interactions, an art gallery, waiting in a queue, and interacting with a group. We implemented our method on a simulated PR2 robot in a 2D simulator (Stage) and a pioneer-3DX mobile robot in the real-world to validate all the scenarios. A comprehensive set of experiments shows that our approach can handle multiple interaction scenarios on both holonomic and non-holonomic robots; hence, it can be a viable option for a Unified Socially-Aware Navigation (USAN).