 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Universal Formulation for Path-Parametric Planning and Control
Paper and Code
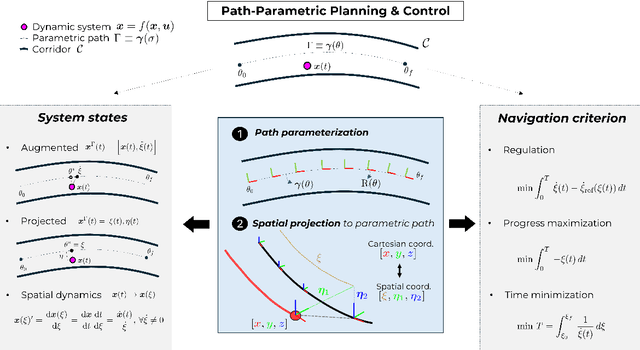
This work presents a unified framework for path-parametric planning and control. This formulation is universal as it standardizes the entire spectrum of path-parametric techniques -- from traditional path following to more recent contouring or progress-maximizing Model Predictive Control and Reinforcement Learning -- under a single framework. The ingredients underlying this universality are twofold: First, we present a compact and efficient technique capable of computing singularity-free, smooth and differentiable moving frames. Second, we derive a spatial path parameterization of the Cartesian coordinates applicable to any arbitrary curve without prior assumptions on its parametric speed or moving frame, and that perfectly interplays with the aforementioned path parameterization method. The combination of these two ingredients leads to a planning and control framework that brings togehter existing path-parametric techniques in literature. Aiming to unify all these approaches, we open source PACOR, a software library that implements the presented content, thereby providing a self-contained toolkit for the formulation of path-parametric planning and control methods.