 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Slosh-Free Tracking for Robotic Manipulators
Feb 07, 2024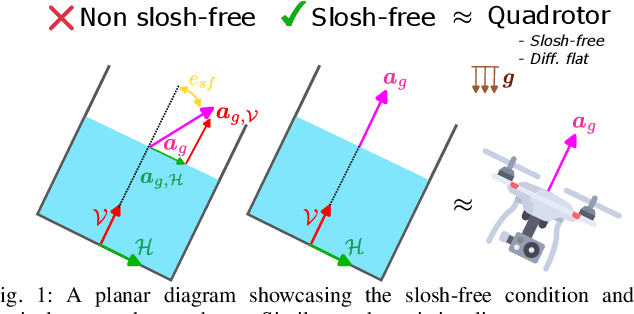
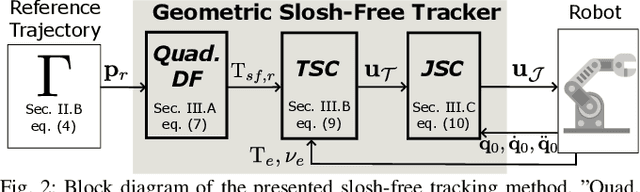
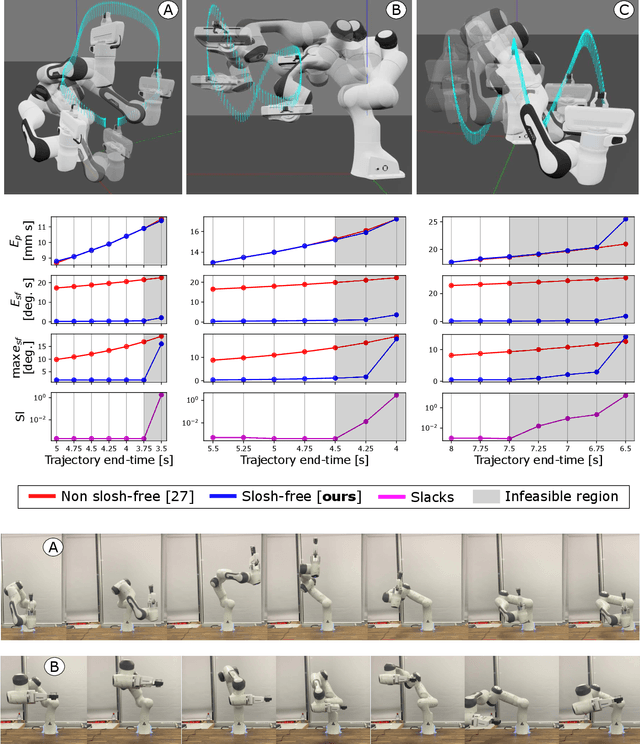
This work focuses on the agile transportation of liquids with robotic manipulators. In contrast to existing methods that are either computationally heavy, system/container specific or dependant on a singularity-prone pendulum model, we present a real-time slosh-free tracking technique. This method solely requires the reference trajectory and the robot's kinematic constraints to output kinematically feasible joint space commands. The crucial element underlying this approach consists on mimicking the end-effector's motion through a virtual quadrotor, which is inherently slosh-free and differentially flat, thereby allowing us to calculate a slosh-free reference orientation. Through the utilization of a cascaded proportional-derivative (PD) controller, this slosh-free reference is transformed into task space acceleration commands, which, following the resolution of a Quadratic Program (QP) based on Resolved Acceleration Control (RAC), are translated into a feasible joint configuration. The validity of the proposed approach is demonstrated by simulated and real-world experiments on a 7 DoF Franka Emika Panda robot. Code: https://github.com/jonarriza96/gsft Video: https://youtu.be/4kitqYVS9n8