 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNormalizing Flows on the Product Space of SO Manifolds for Probabilistic Human Pose Modeling
Apr 08, 2024Normalizing flows have proven their efficacy for density estimation in Euclidean space, but their application to rotational representations, crucial in various domains such as robotics or human pose modeling, remains underexplored. Probabilistic models of the human pose can benefit from approaches that rigorously consider the rotational nature of human joints. For this purpose, we introduce HuProSO3, a normalizing flow model that operates on a high-dimensional product space of SO(3) manifolds, modeling the joint distribution for human joints with three degrees of freedom. HuProSO3's advantage over state-of-the-art approaches is demonstrated through its superior modeling accuracy in three different applications and its capability to evaluate the exact likelihood. This work not only addresses the technical challenge of learning densities on SO(3) manifolds, but it also has broader implications for domains where the probabilistic regression of correlated 3D rotations is of importance.
Scene-Graph ViT: End-to-End Open-Vocabulary Visual Relationship Detection
Mar 21, 2024



Visual relationship detection aims to identify objects and their relationships in images. Prior methods approach this task by adding separate relationship modules or decoders to existing object detection architectures. This separation increases complexity and hinders end-to-end training, which limits performance. We propose a simple and highly efficient decoder-free architecture for open-vocabulary visual relationship detection. Our model consists of a Transformer-based image encoder that represents objects as tokens and models their relationships implicitly. To extract relationship information, we introduce an attention mechanism that selects object pairs likely to form a relationship. We provide a single-stage recipe to train this model on a mixture of object and relationship detection data. Our approach achieves state-of-the-art relationship detection performance on Visual Genome and on the large-vocabulary GQA benchmark at real-time inference speeds. We provide analyses of zero-shot performance, ablations, and real-world qualitative examples.
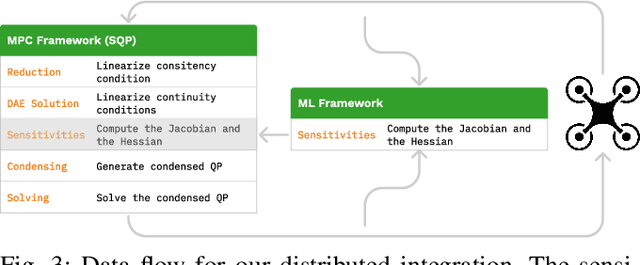
Learning for CasADi: Data-driven Models in Numerical Optimization
Dec 10, 2023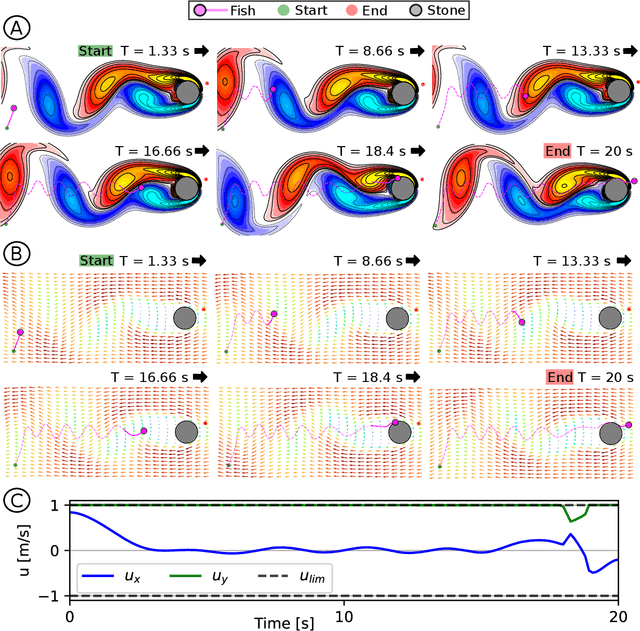
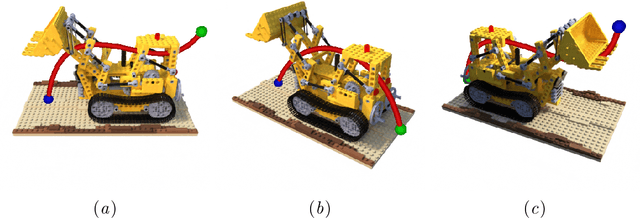
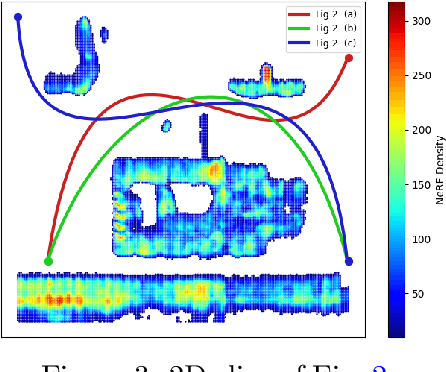
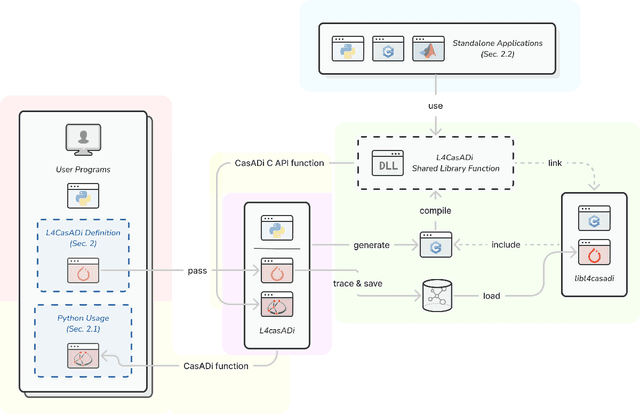
While real-world problems are often challenging to analyze analytically, deep learning excels in modeling complex processes from data. Existing optimization frameworks like CasADi facilitate seamless usage of solvers but face challenges when integrating learned process models into numerical optimizations. To address this gap, we present the Learning for CasADi (L4CasADi) framework, enabling the seamless integration of PyTorch-learned models with CasADi for efficient and potentially hardware-accelerated numerical optimization. The applicability of L4CasADi is demonstrated with two tutorial examples: First, we optimize a fish's trajectory in a turbulent river for energy efficiency where the turbulent flow is represented by a PyTorch model. Second, we demonstrate how an implicit Neural Radiance Field environment representation can be easily leveraged for optimal control with L4CasADi. L4CasADi, along with examples and documentation, is available under MIT license at https://github.com/Tim-Salzmann/l4casadi
Robots That Can See: Leveraging Human Pose for Trajectory Prediction
Sep 29, 2023



Anticipating the motion of all humans in dynamic environments such as homes and offices is critical to enable safe and effective robot navigation. Such spaces remain challenging as humans do not follow strict rules of motion and there are often multiple occluded entry points such as corners and doors that create opportunities for sudden encounters. In this work, we present a Transformer based architecture to predict human future trajectories in human-centric environments from input features including human positions, head orientations, and 3D skeletal keypoints from onboard in-the-wild sensory information. The resulting model captures the inherent uncertainty for future human trajectory prediction and achieves state-of-the-art performance on common prediction benchmarks and a human tracking dataset captured from a mobile robot adapted for the prediction task. Furthermore, we identify new agents with limited historical data as a major contributor to error and demonstrate the complementary nature of 3D skeletal poses in reducing prediction error in such challenging scenarios.
* Project page: https://human-scene-transformer.github.io/
Motron: Multimodal Probabilistic Human Motion Forecasting
Mar 25, 2022
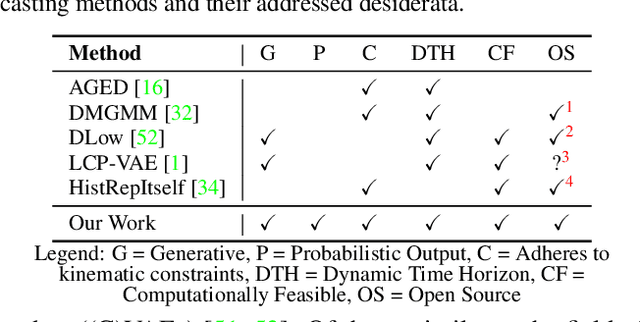

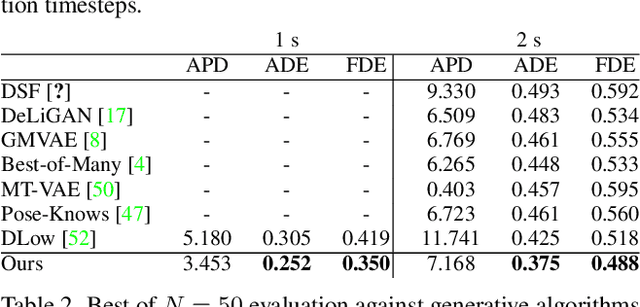
Autonomous systems and humans are increasingly sharing the same space. Robots work side by side or even hand in hand with humans to balance each other's limitations. Such cooperative interactions are ever more sophisticated. Thus, the ability to reason not just about a human's center of gravity position, but also its granular motion is an important prerequisite for human-robot interaction. Though, many algorithms ignore the multimodal nature of humans or neglect uncertainty in their motion forecasts. We present Motron, a multimodal, probabilistic, graph-structured model, that captures human's multimodality using probabilistic methods while being able to output deterministic maximum-likelihood motions and corresponding confidence values for each mode. Our model aims to be tightly integrated with the robotic planning-control-interaction loop; outputting physically feasible human motions and being computationally efficient. We demonstrate the performance of our model on several challenging real-world motion forecasting datasets, outperforming a wide array of generative/variational methods while providing state-of-the-art single-output motions if required. Both using significantly less computational power than state-of-the art algorithms.
Neural-MPC: Deep Learning Model Predictive Control for Quadrotors and Agile Robotic Platforms
Mar 15, 2022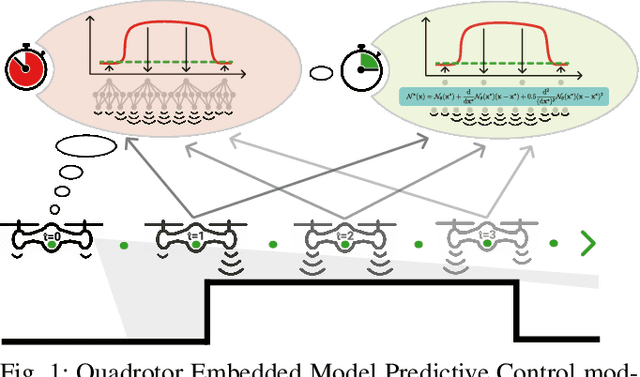
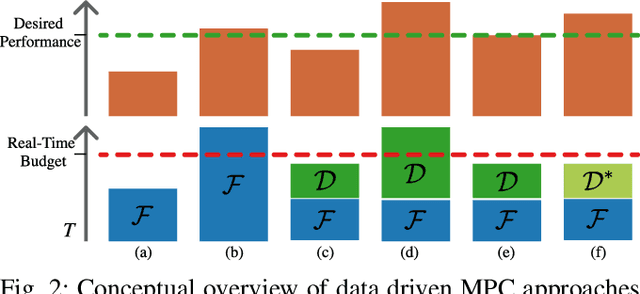
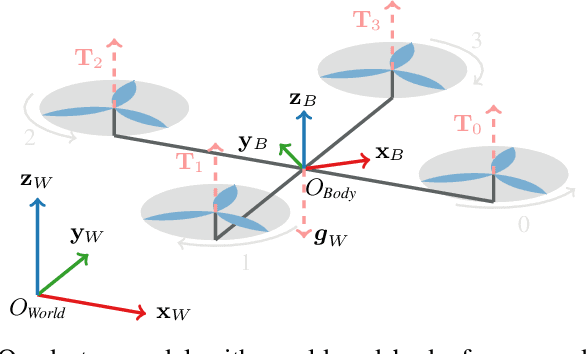
Model Predictive Control (MPC) has become a popular framework in embedded control for high-performance autonomous systems. However, to achieve good control performance using MPC, an accurate dynamics model is key. To maintain real-time operation, the dynamics models used on embedded systems have been limited to simple first-principle models, which substantially limits their representative power. In contrast, neural networks can model complex effects purely from data. In contrast to such simple models, machine learning approaches such as neural networks have been shown to accurately model even complex dynamic effects, but their large computational complexity hindered combination with fast real-time iteration loops. With this work, we present Neural-MPC, a framework to efficiently integrate large, complex neural network architectures as dynamics models within a model-predictive control pipeline. Our experiments, performed in simulation and the real world on a highly agile quadrotor platform, demonstrate up to 83% reduction in positional tracking error when compared to state-of-the-art MPC approaches without neural network dynamics.
Trajectron++: Multi-Agent Generative Trajectory Forecasting With Heterogeneous Data for Control
Jan 09, 2020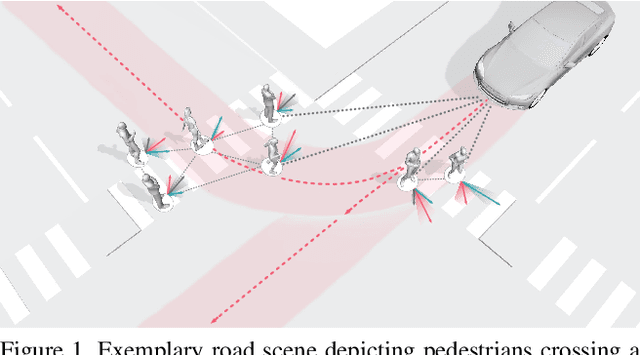
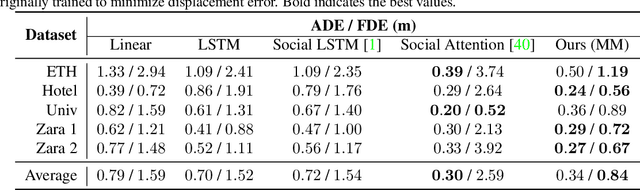

Reasoning about human motion through an environment is an important prerequisite to safe and socially-aware robotic navigation. As a result, multi-agent behavior prediction has become a core component of modern human-robot interactive systems, such as self-driving cars. While there exist a multitude of methods for trajectory forecasting, many of them have only been evaluated with one semantic class of agents and only use prior trajectory information, ignoring a plethora of information available online to autonomous systems from common sensors. Towards this end, we present Trajectron++, a modular, graph-structured recurrent model that forecasts the trajectories of a general number of agents with distinct semantic classes while incorporating heterogeneous data (e.g. semantic maps and camera images). Our model is designed to be tightly integrated with robotic planning and control frameworks; it is capable of producing predictions that are conditioned on ego-agent motion plans. We demonstrate the performance of our model on several challenging real-world trajectory forecasting datasets, outperforming a wide array of state-of-the-art deterministic and generative methods.