 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNormalizing Flows on the Product Space of SO Manifolds for Probabilistic Human Pose Modeling
Apr 08, 2024Normalizing flows have proven their efficacy for density estimation in Euclidean space, but their application to rotational representations, crucial in various domains such as robotics or human pose modeling, remains underexplored. Probabilistic models of the human pose can benefit from approaches that rigorously consider the rotational nature of human joints. For this purpose, we introduce HuProSO3, a normalizing flow model that operates on a high-dimensional product space of SO(3) manifolds, modeling the joint distribution for human joints with three degrees of freedom. HuProSO3's advantage over state-of-the-art approaches is demonstrated through its superior modeling accuracy in three different applications and its capability to evaluate the exact likelihood. This work not only addresses the technical challenge of learning densities on SO(3) manifolds, but it also has broader implications for domains where the probabilistic regression of correlated 3D rotations is of importance.
Three-dimensional Simultaneous Shape and Pose Estimation for Extended Objects Using Spherical Harmonics
Dec 25, 2020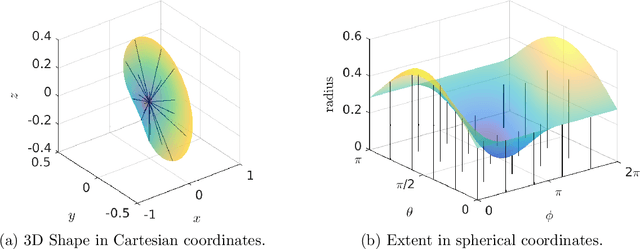
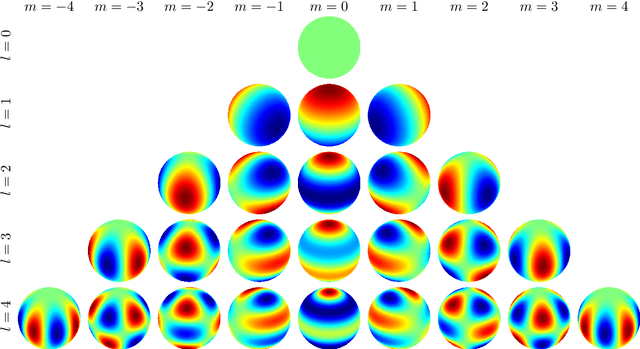
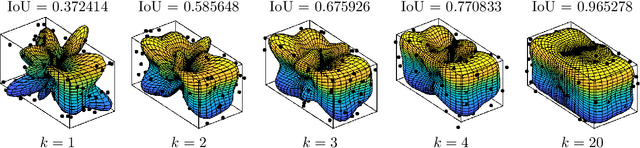
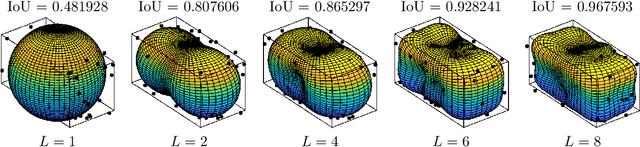
We propose a new recursive method for simultaneous estimation of both the pose and the shape of a three-dimensional extended object. The key idea of the presented method is to represent the shape of the object using spherical harmonics, similar to the way Fourier series can be used in the two-dimensional case. This allows us to derive a measurement equation that can be used within the framework of nonlinear filters such as the UKF. We provide both simulative and experimental evaluations of the novel techniques.
Directional Statistics and Filtering Using libDirectional
Dec 28, 2017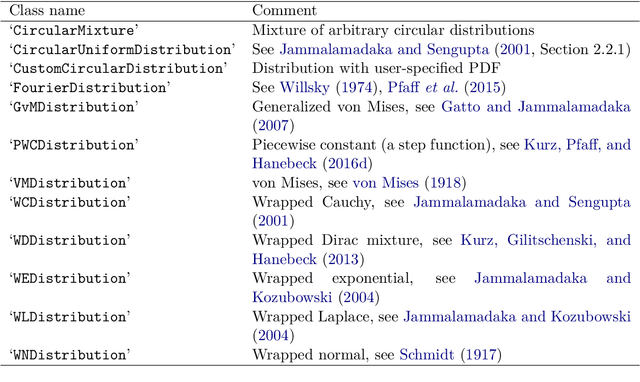
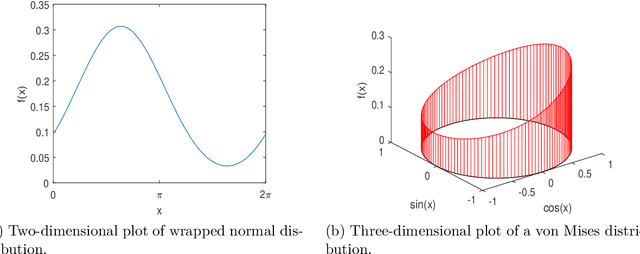
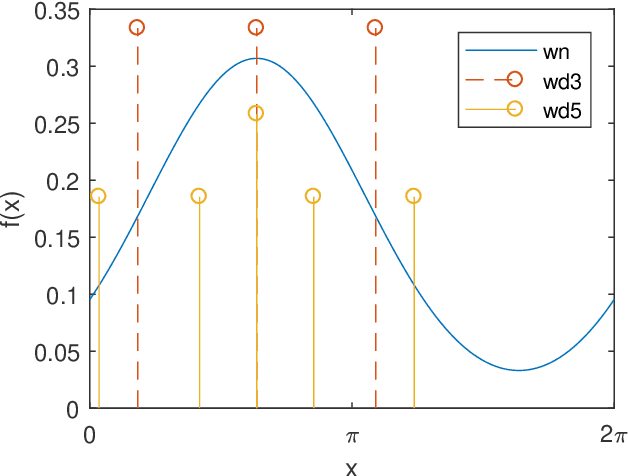
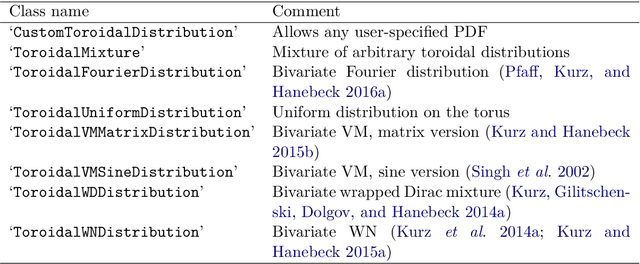
In this paper, we present libDirectional, a MATLAB library for directional statistics and directional estimation. It supports a variety of commonly used distributions on the unit circle, such as the von Mises, wrapped normal, and wrapped Cauchy distributions. Furthermore, various distributions on higher-dimensional manifolds such as the unit hypersphere and the hypertorus are available. Based on these distributions, several recursive filtering algorithms in libDirectional allow estimation on these manifolds. The functionality is implemented in a clear, well-documented, and object-oriented structure that is both easy to use and easy to extend.