 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Invalid Map Merges in Lifelong SLAM
Nov 07, 2022



For Lifelong SLAM, one has to deal with temporary localization failures, e.g., induced by kidnapping. We achieve this by starting a new map and merging it with the previous map as soon as relocalization succeeds. Since relocalization methods are fallible, it can happen that such a merge is invalid, e.g., due to perceptual aliasing. To address this issue, we propose methods to detect and undo invalid merges. These methods compare incoming scans with scans that were previously merged into the current map and consider how well they agree with each other. Evaluation of our methods takes place using a dataset that consists of multiple flat and office environments, as well as the public MIT Stata Center dataset. We show that methods based on a change detection algorithm and on comparison of gridmaps perform well in both environments and can be run in real-time with a reasonable computational cost.
When Geometry is not Enough: Using Reflector Markers in Lidar SLAM
Nov 07, 2022



Lidar-based SLAM systems perform well in a wide range of circumstances by relying on the geometry of the environment. However, even mature and reliable approaches struggle when the environment contains structureless areas such as long hallways. To allow the use of lidar-based SLAM in such environments, we propose to add reflector markers in specific locations that would otherwise be difficult. We present an algorithm to reliably detect these markers and two approaches to fuse the detected markers with geometry-based scan matching. The performance of the proposed methods is demonstrated on real-world datasets from several industrial environments.
Multiple Instance Learning for Brain Tumor Detection from Magnetic Resonance Spectroscopy Data
Dec 16, 2021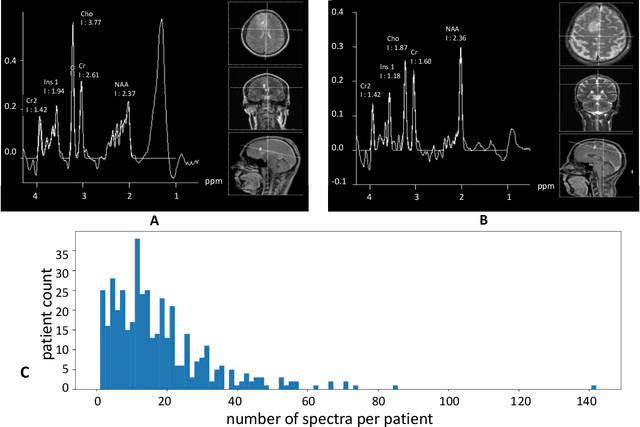
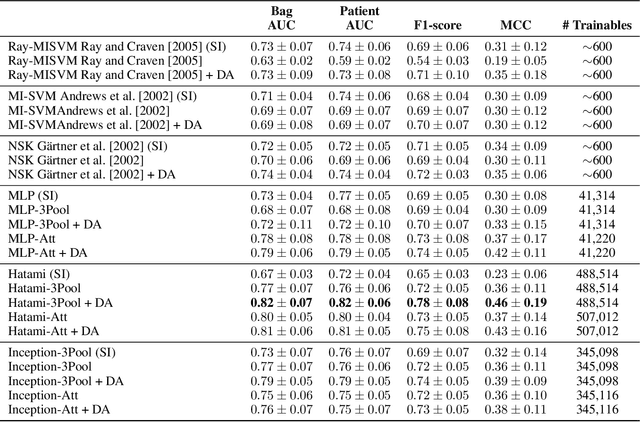
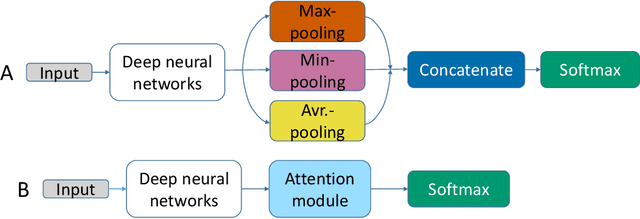
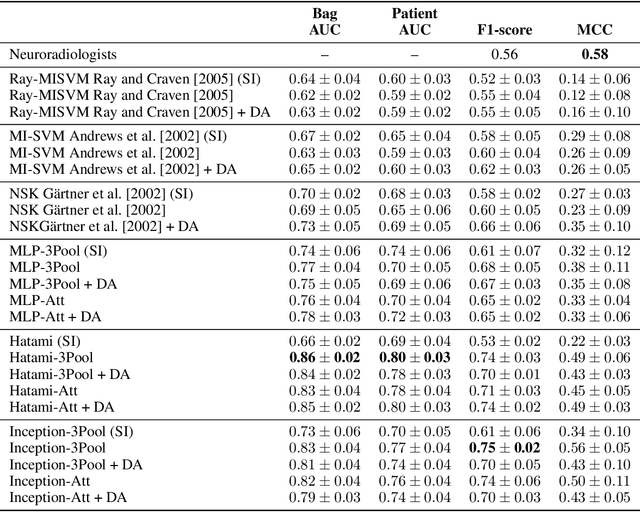
We apply deep learning (DL) on Magnetic resonance spectroscopy (MRS) data for the task of brain tumor detection. Medical applications often suffer from data scarcity and corruption by noise. Both of these problems are prominent in our data set. Furthermore, a varying number of spectra are available for the different patients. We address these issues by considering the task as a multiple instance learning (MIL) problem. Specifically, we aggregate multiple spectra from the same patient into a "bag" for classification and apply data augmentation techniques. To achieve the permutation invariance during the process of bagging, we proposed two approaches: (1) to apply min-, max-, and average-pooling on the features of all samples in one bag and (2) to apply an attention mechanism. We tested these two approaches on multiple neural network architectures. We demonstrate that classification performance is significantly improved when training on multiple instances rather than single spectra. We propose a simple oversampling data augmentation method and show that it could further improve the performance. Finally, we demonstrate that our proposed model outperforms manual classification by neuroradiologists according to most performance metrics.
Geometry-based Graph Pruning for Lifelong SLAM
Oct 04, 2021



Lifelong SLAM considers long-term operation of a robot where already mapped locations are revisited many times in changing environments. As a result, traditional graph-based SLAM approaches eventually become extremely slow due to the continuous growth of the graph and the loss of sparsity. Both problems can be addressed by a graph pruning algorithm. It carefully removes vertices and edges to keep the graph size reasonable while preserving the information needed to provide good SLAM results. We propose a novel method that considers geometric criteria for choosing the vertices to be pruned. It is efficient, easy to implement, and leads to a graph with evenly spread vertices that remain part of the robot trajectory. Furthermore, we present a novel approach of marginalization that is more robust to wrong loop closures than existing methods. The proposed algorithm is evaluated on two publicly available real-world long-term datasets and compared to the unpruned case as well as ground truth. We show that even on a long dataset (25h), our approach manages to keep the graph sparse and the speed high while still providing good accuracy (40 times speed up, 6cm map error compared to unpruned case).
Three-dimensional Simultaneous Shape and Pose Estimation for Extended Objects Using Spherical Harmonics
Dec 25, 2020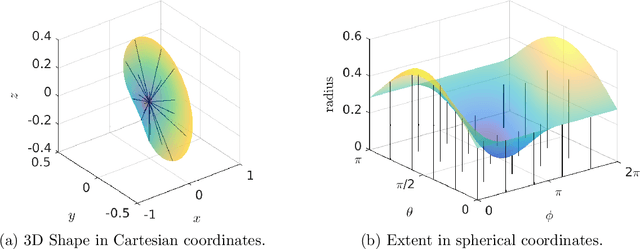
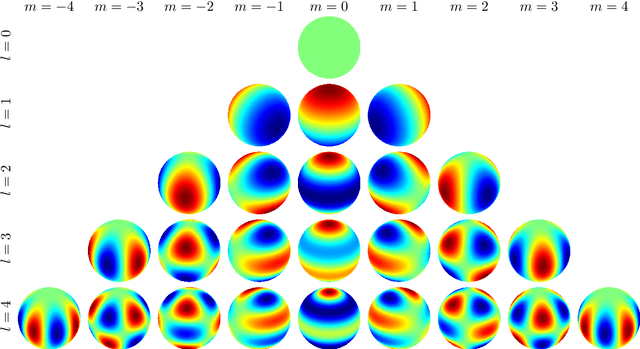
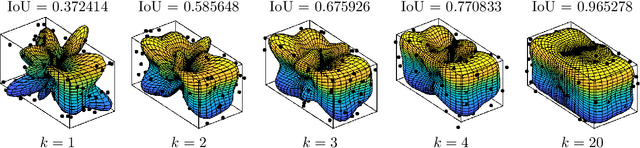
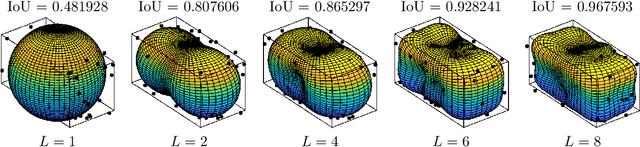
We propose a new recursive method for simultaneous estimation of both the pose and the shape of a three-dimensional extended object. The key idea of the presented method is to represent the shape of the object using spherical harmonics, similar to the way Fourier series can be used in the two-dimensional case. This allows us to derive a measurement equation that can be used within the framework of nonlinear filters such as the UKF. We provide both simulative and experimental evaluations of the novel techniques.
Directional Statistics and Filtering Using libDirectional
Dec 28, 2017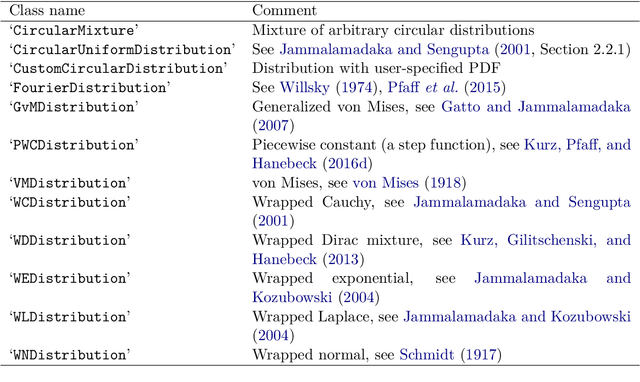
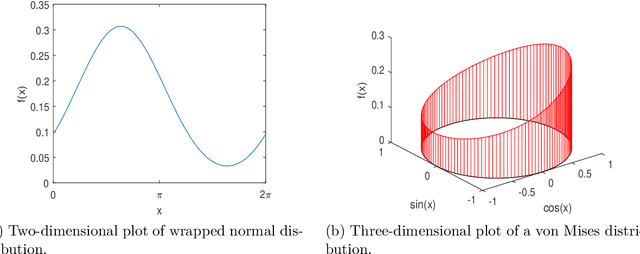
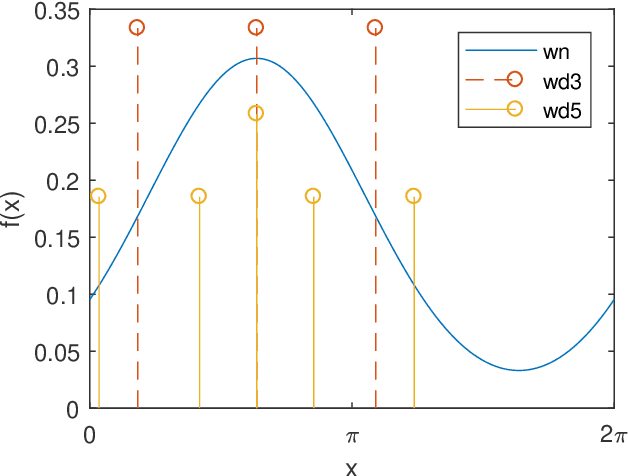
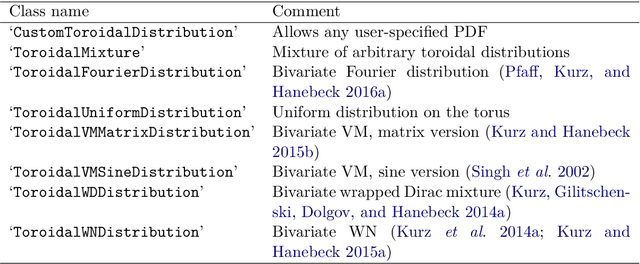
In this paper, we present libDirectional, a MATLAB library for directional statistics and directional estimation. It supports a variety of commonly used distributions on the unit circle, such as the von Mises, wrapped normal, and wrapped Cauchy distributions. Furthermore, various distributions on higher-dimensional manifolds such as the unit hypersphere and the hypertorus are available. Based on these distributions, several recursive filtering algorithms in libDirectional allow estimation on these manifolds. The functionality is implemented in a clear, well-documented, and object-oriented structure that is both easy to use and easy to extend.
Recursive Bayesian Filtering in Circular State Spaces
Jan 21, 2015


For recursive circular filtering based on circular statistics, we introduce a general framework for estimation of a circular state based on different circular distributions, specifically the wrapped normal distribution and the von Mises distribution. We propose an estimation method for circular systems with nonlinear system and measurement functions. This is achieved by relying on efficient deterministic sampling techniques. Furthermore, we show how the calculations can be simplified in a variety of important special cases, such as systems with additive noise as well as identity system or measurement functions. We introduce several novel key components, particularly a distribution-free prediction algorithm, a new and superior formula for the multiplication of wrapped normal densities, and the ability to deal with non-additive system noise. All proposed methods are thoroughly evaluated and compared to several state-of-the-art solutions.
Unscented Orientation Estimation Based on the Bingham Distribution
Nov 22, 2013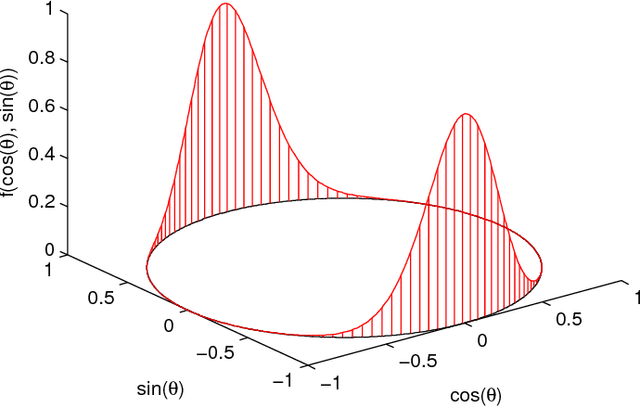
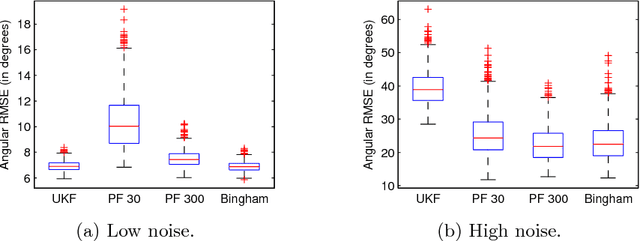
Orientation estimation for 3D objects is a common problem that is usually tackled with traditional nonlinear filtering techniques such as the extended Kalman filter (EKF) or the unscented Kalman filter (UKF). Most of these techniques assume Gaussian distributions to account for system noise and uncertain measurements. This distributional assumption does not consider the periodic nature of pose and orientation uncertainty. We propose a filter that considers the periodicity of the orientation estimation problem in its distributional assumption. This is achieved by making use of the Bingham distribution, which is defined on the hypersphere and thus inherently more suitable to periodic problems. Furthermore, handling of non-trivial system functions is done using deterministic sampling in an efficient way. A deterministic sampling scheme reminiscent of the UKF is proposed for the nonlinear manifold of orientations. It is the first deterministic sampling scheme that truly reflects the nonlinear manifold of the orientation.
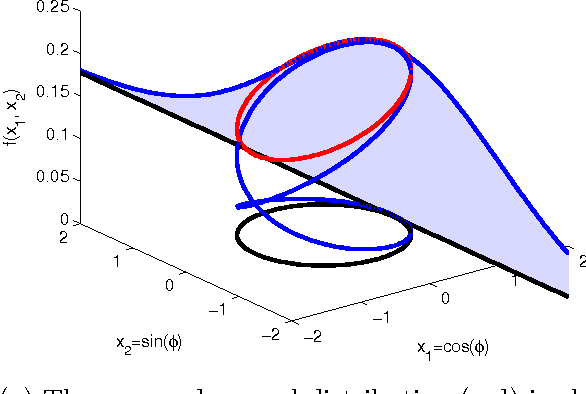
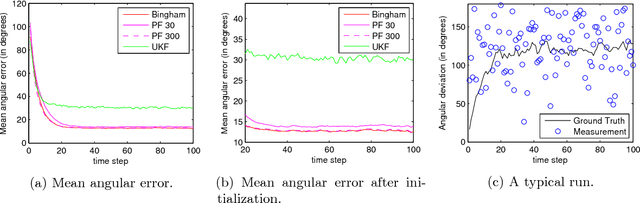
Recursive Estimation of Orientation Based on the Bingham Distribution
Apr 30, 2013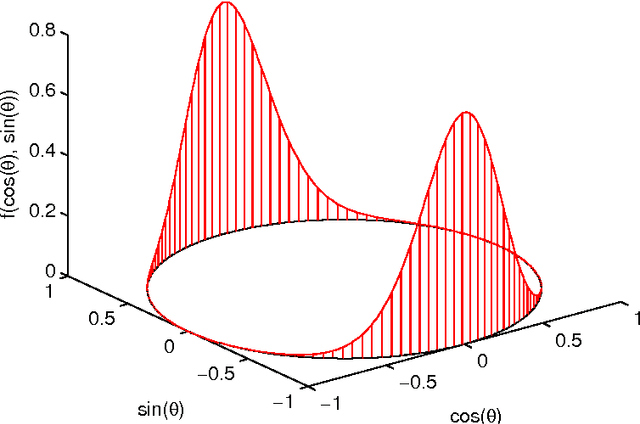
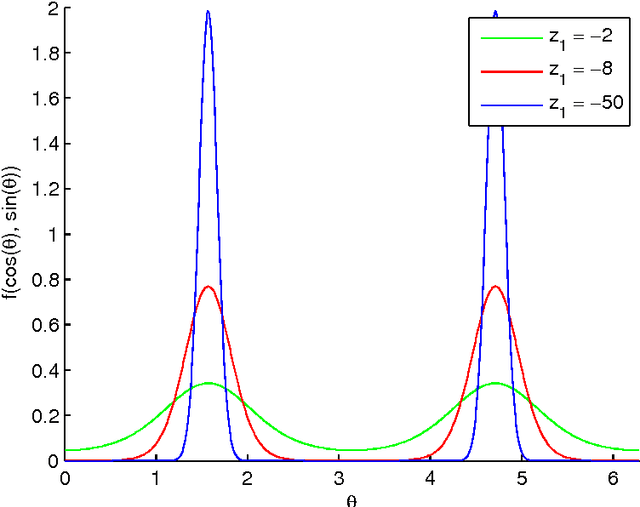
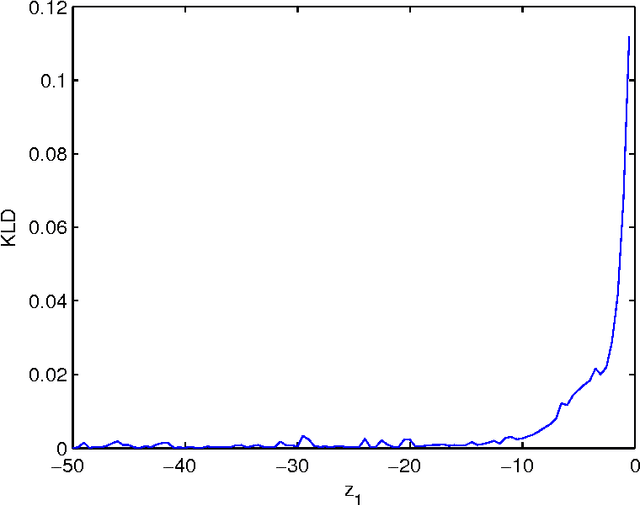
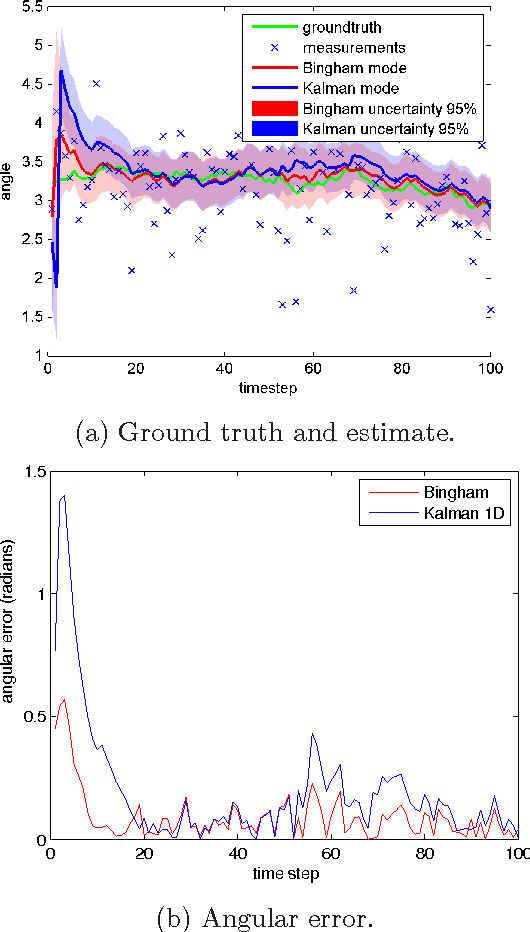
Directional estimation is a common problem in many tracking applications. Traditional filters such as the Kalman filter perform poorly because they fail to take the periodic nature of the problem into account. We present a recursive filter for directional data based on the Bingham distribution in two dimensions. The proposed filter can be applied to circular filtering problems with 180 degree symmetry, i.e., rotations by 180 degrees cannot be distinguished. It is easily implemented using standard numerical techniques and suitable for real-time applications. The presented approach is extensible to quaternions, which allow tracking arbitrary three-dimensional orientations. We evaluate our filter in a challenging scenario and compare it to a traditional Kalman filtering approach.