 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCubeDN: Real-time Drone Detection in 3D Space from Dual mmWave Radar Cubes
Aug 25, 2025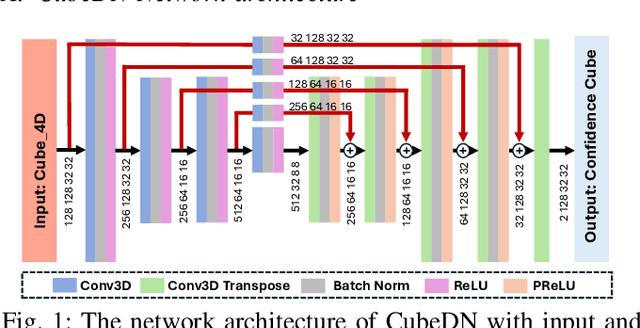
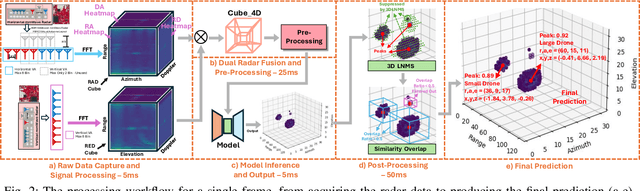
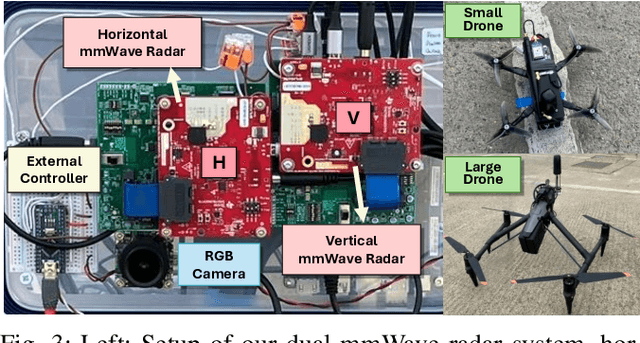
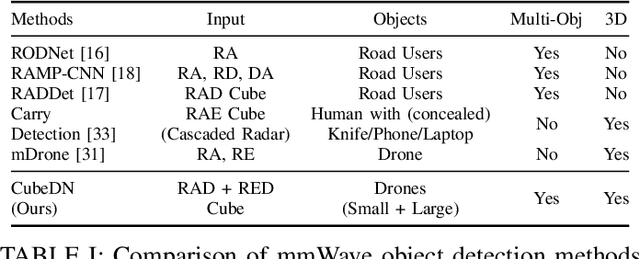
As drone use has become more widespread, there is a critical need to ensure safety and security. A key element of this is robust and accurate drone detection and localization. While cameras and other optical sensors like LiDAR are commonly used for object detection, their performance degrades under adverse lighting and environmental conditions. Therefore, this has generated interest in finding more reliable alternatives, such as millimeter-wave (mmWave) radar. Recent research on mmWave radar object detection has predominantly focused on 2D detection of road users. Although these systems demonstrate excellent performance for 2D problems, they lack the sensing capability to measure elevation, which is essential for 3D drone detection. To address this gap, we propose CubeDN, a single-stage end-to-end radar object detection network specifically designed for flying drones. CubeDN overcomes challenges such as poor elevation resolution by utilizing a dual radar configuration and a novel deep learning pipeline. It simultaneously detects, localizes, and classifies drones of two sizes, achieving decimeter-level tracking accuracy at closer ranges with overall $95\%$ average precision (AP) and $85\%$ average recall (AR). Furthermore, CubeDN completes data processing and inference at 10Hz, making it highly suitable for practical applications.
Unreal Robotics Lab: A High-Fidelity Robotics Simulator with Advanced Physics and Rendering
Apr 19, 2025High-fidelity simulation is essential for robotics research, enabling safe and efficient testing of perception, control, and navigation algorithms. However, achieving both photorealistic rendering and accurate physics modeling remains a challenge. This paper presents a novel simulation framework--the Unreal Robotics Lab (URL) that integrates the Unreal Engine's advanced rendering capabilities with MuJoCo's high-precision physics simulation. Our approach enables realistic robotic perception while maintaining accurate physical interactions, facilitating benchmarking and dataset generation for vision-based robotics applications. The system supports complex environmental effects, such as smoke, fire, and water dynamics, which are critical for evaluating robotic performance under adverse conditions. We benchmark visual navigation and SLAM methods within our framework, demonstrating its utility for testing real-world robustness in controlled yet diverse scenarios. By bridging the gap between physics accuracy and photorealistic rendering, our framework provides a powerful tool for advancing robotics research and sim-to-real transfer.
Risk-aware Classification via Uncertainty Quantification
Dec 04, 2024



Autonomous and semi-autonomous systems are using deep learning models to improve decision-making. However, deep classifiers can be overly confident in their incorrect predictions, a major issue especially in safety-critical domains. The present study introduces three foundational desiderata for developing real-world risk-aware classification systems. Expanding upon the previously proposed Evidential Deep Learning (EDL), we demonstrate the unity between these principles and EDL's operational attributes. We then augment EDL empowering autonomous agents to exercise discretion during structured decision-making when uncertainty and risks are inherent. We rigorously examine empirical scenarios to substantiate these theoretical innovations. In contrast to existing risk-aware classifiers, our proposed methodologies consistently exhibit superior performance, underscoring their transformative potential in risk-conscious classification strategies.
Kalman Filter Auto-tuning through Enforcing Chi-Squared Normalized Error Distributions with Bayesian Optimization
Jun 12, 2023The nonlinear and stochastic relationship between noise covariance parameter values and state estimator performance makes optimal filter tuning a very challenging problem. Popular optimization-based tuning approaches can easily get trapped in local minima, leading to poor noise parameter identification and suboptimal state estimation. Recently, black box techniques based on Bayesian optimization with Gaussian processes (GPBO) have been shown to overcome many of these issues, using normalized estimation error squared (NEES) and normalized innovation error (NIS) statistics to derive cost functions for Kalman filter auto-tuning. While reliable noise parameter estimates are obtained in many cases, GPBO solutions obtained with these conventional cost functions do not always converge to optimal filter noise parameters and lack robustness to parameter ambiguities in time-discretized system models. This paper addresses these issues by making two main contributions. First, we show that NIS and NEES errors are only chi-squared distributed for tuned estimators. As a result, chi-square tests are not sufficient to ensure that an estimator has been correctly tuned. We use this to extend the familiar consistency tests for NIS and NEES to penalize if the distribution is not chi-squared distributed. Second, this cost measure is applied within a Student-t processes Bayesian Optimization (TPBO) to achieve robust estimator performance for time discretized state space models. The robustness, accuracy, and reliability of our approach are illustrated on classical state estimation problems.
MDPose: Human Skeletal Motion Reconstruction Using WiFi Micro-Doppler Signatures
Jan 11, 2022
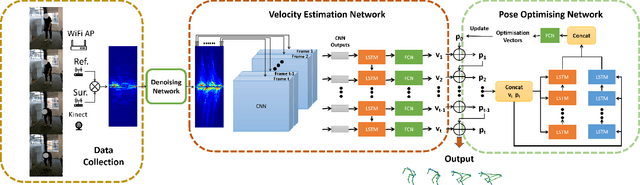
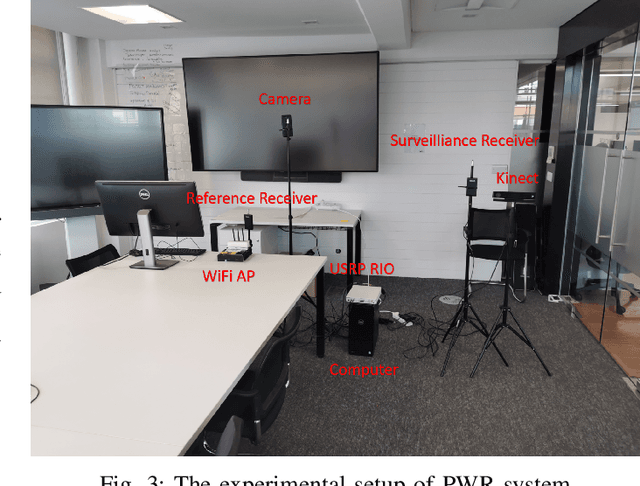
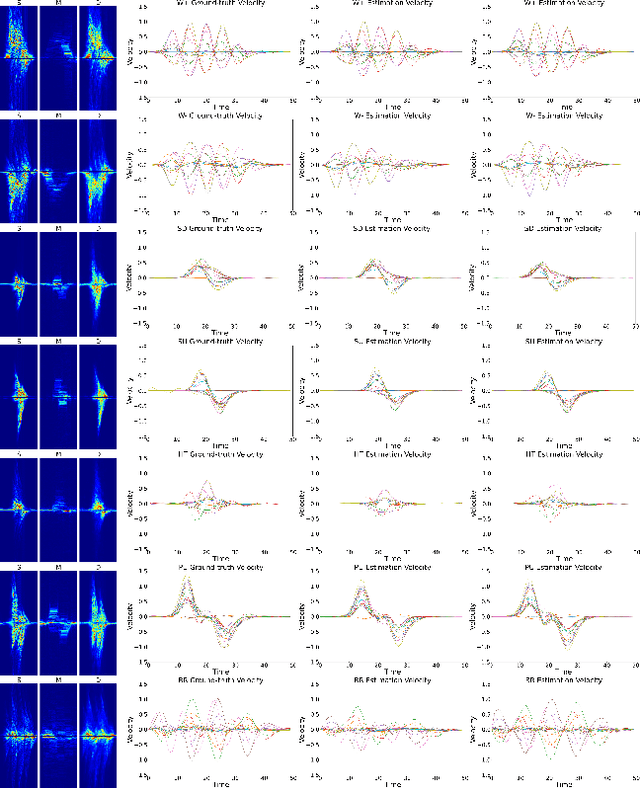
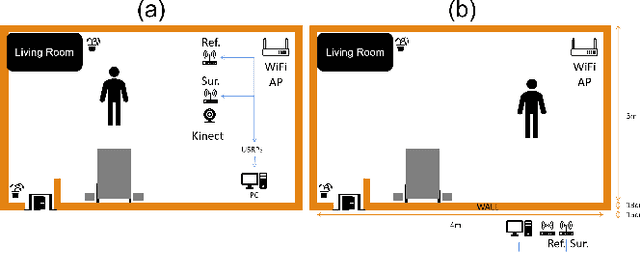
Motion tracking systems based on optical sensors typically often suffer from issues, such as poor lighting conditions, occlusion, limited coverage, and may raise privacy concerns. More recently, radio frequency (RF)-based approaches using commercial WiFi devices have emerged which offer low-cost ubiquitous sensing whilst preserving privacy. However, the output of an RF sensing system, such as Range-Doppler spectrograms, cannot represent human motion intuitively and usually requires further processing. In this study, MDPose, a novel framework for human skeletal motion reconstruction based on WiFi micro-Doppler signatures, is proposed. It provides an effective solution to track human activities by reconstructing a skeleton model with 17 key points, which can assist with the interpretation of conventional RF sensing outputs in a more understandable way. Specifically, MDPose has various incremental stages to gradually address a series of challenges: First, a denoising algorithm is implemented to remove any unwanted noise that may affect the feature extraction and enhance weak Doppler signatures. Secondly, the convolutional neural network (CNN)-recurrent neural network (RNN) architecture is applied to learn temporal-spatial dependency from clean micro-Doppler signatures and restore key points' velocity information. Finally, a pose optimising mechanism is employed to estimate the initial state of the skeleton and to limit the increase of error. We have conducted comprehensive tests in a variety of environments using numerous subjects with a single receiver radar system to demonstrate the performance of MDPose, and report 29.4mm mean absolute error over all key points positions, which outperforms state-of-the-art RF-based pose estimation systems.
FMNet: Latent Feature-wise Mapping Network for Cleaning up Noisy Micro-Doppler Spectrogram
Jul 09, 2021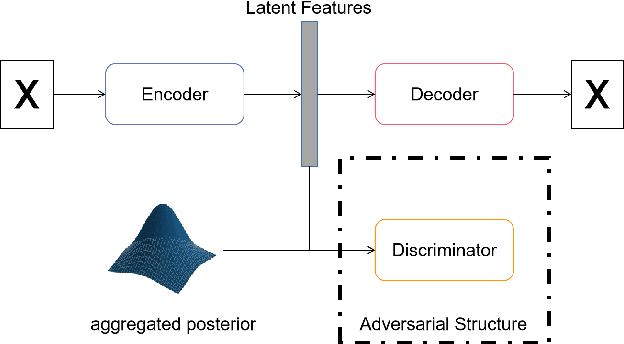
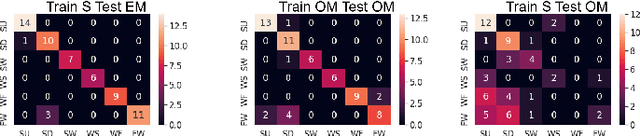
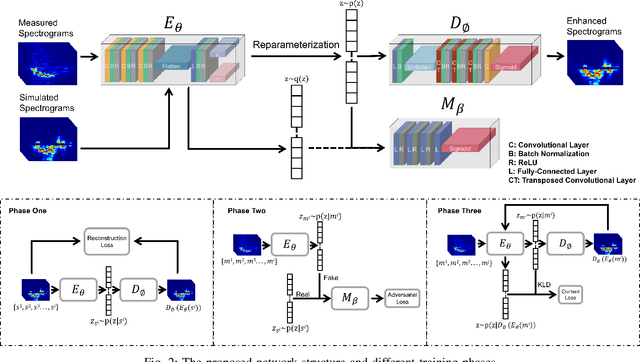
Micro-Doppler signatures contain considerable information about target dynamics. However, the radar sensing systems are easily affected by noisy surroundings, resulting in uninterpretable motion patterns on the micro-Doppler spectrogram. Meanwhile, radar returns often suffer from multipath, clutter and interference. These issues lead to difficulty in, for example motion feature extraction, activity classification using micro Doppler signatures ($\mu$-DS), etc. In this paper, we propose a latent feature-wise mapping strategy, called Feature Mapping Network (FMNet), to transform measured spectrograms so that they more closely resemble the output from a simulation under the same conditions. Based on measured spectrogram and the matched simulated data, our framework contains three parts: an Encoder which is used to extract latent representations/features, a Decoder outputs reconstructed spectrogram according to the latent features, and a Discriminator minimizes the distance of latent features of measured and simulated data. We demonstrate the FMNet with six activities data and two experimental scenarios, and final results show strong enhanced patterns and can keep actual motion information to the greatest extent. On the other hand, we also propose a novel idea which trains a classifier with only simulated data and predicts new measured samples after cleaning them up with the FMNet. From final classification results, we can see significant improvements.
Learning from Natural Noise to Denoise Micro-Doppler Spectrogram
Feb 13, 2021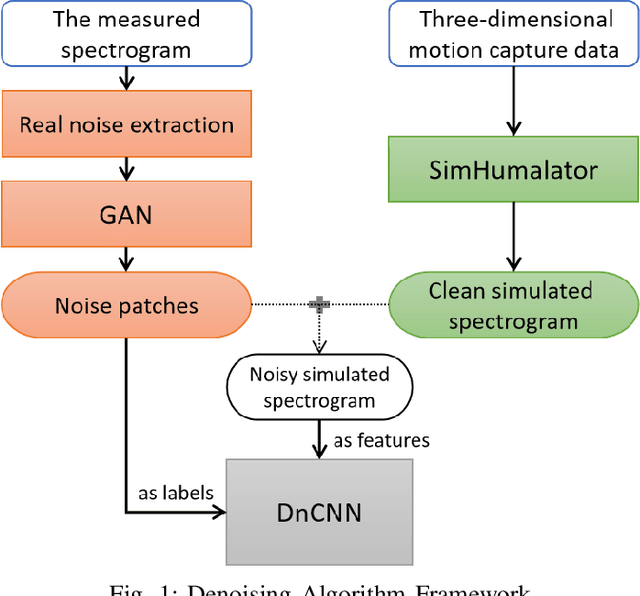
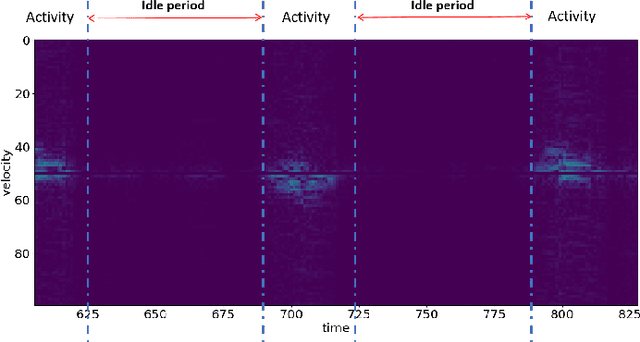
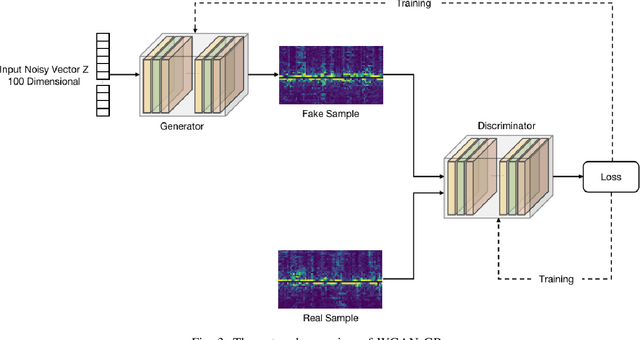
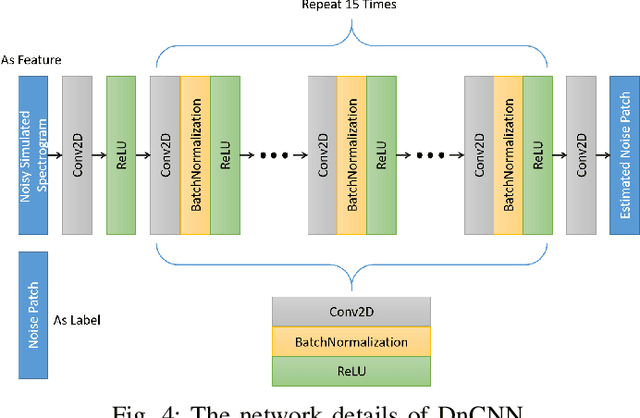
Micro-Doppler analysis has become increasingly popular in recent years owning to the ability of the technique to enhance classification strategies. Applications include recognising everyday human activities, distinguishing drone from birds, and identifying different types of vehicles. However, noisy time-frequency spectrograms can significantly affect the performance of the classifier and must be tackled using appropriate denoising algorithms. In recent years, deep learning algorithms have spawned many deep neural network-based denoising algorithms. For these methods, noise modelling is the most important part and is used to assist in training. In this paper, we decompose the problem and propose a novel denoising scheme: first, a Generative Adversarial Network (GAN) is used to learn the noise distribution and correlation from the real-world environment; then, a simulator is used to generate clean Micro-Doppler spectrograms; finally, the generated noise and clean simulation data are combined as the training data to train a Convolutional Neural Network (CNN) denoiser. In experiments, we qualitatively and quantitatively analyzed this procedure on both simulation and measurement data. Besides, the idea of learning from natural noise can be applied well to other existing frameworks and demonstrate greater performance than other noise models.
Kalman Filter Tuning with Bayesian Optimization
Dec 17, 2019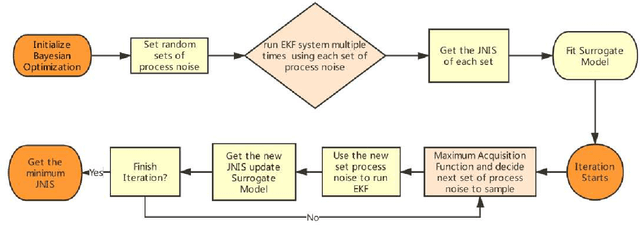
Many state estimation algorithms must be tuned given the state space process and observation models, the process and observation noise parameters must be chosen. Conventional tuning approaches rely on heuristic hand-tuning or gradient-based optimization techniques to minimize a performance cost function. However, the relationship between tuned noise values and estimator performance is highly nonlinear and stochastic. Therefore, the tuning solutions can easily get trapped in local minima, which can lead to poor choices of noise parameters and suboptimal estimator performance. This paper describes how Bayesian Optimization (BO) can overcome these issues. BO poses optimization as a Bayesian search problem for a stochastic ``black box'' cost function, where the goal is to search the solution space to maximize the probability of improving the current best solution. As such, BO offers a principled approach to optimization-based estimator tuning in the presence of local minima and performance stochasticity. While extended Kalman filters (EKFs) are the main focus of this work, BO can be similarly used to tune other related state space filters. The method presented here uses performance metrics derived from normalized innovation squared (NIS) filter residuals obtained via sensor data, which renders knowledge of ground-truth states unnecessary. The robustness, accuracy, and reliability of BO-based tuning is illustrated on practical nonlinear state estimation problems,losed-loop aero-robotic control.
NeuroMask: Explaining Predictions of Deep Neural Networks through Mask Learning
Aug 05, 2019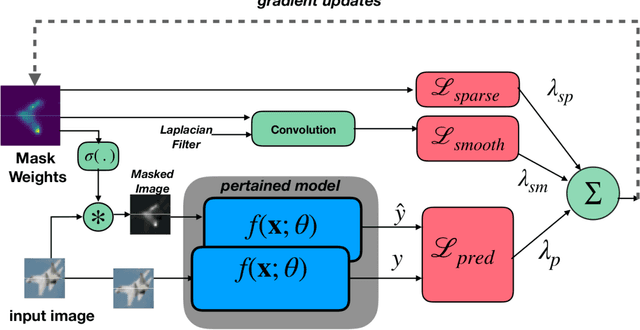
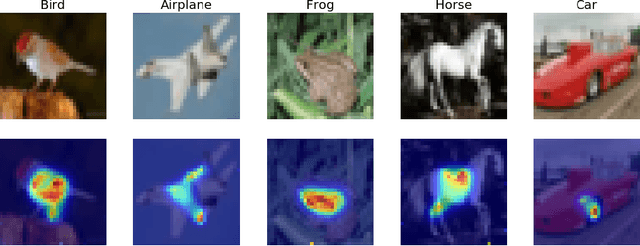
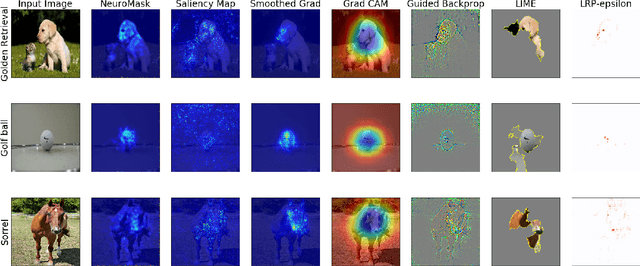
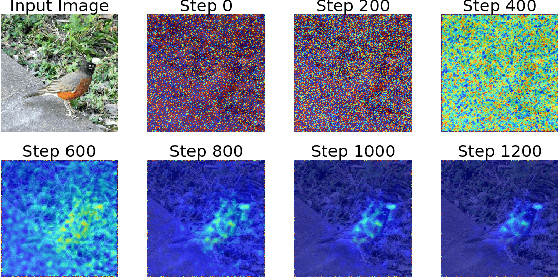
Deep Neural Networks (DNNs) deliver state-of-the-art performance in many image recognition and understanding applications. However, despite their outstanding performance, these models are black-boxes and it is hard to understand how they make their decisions. Over the past few years, researchers have studied the problem of providing explanations of why DNNs predicted their results. However, existing techniques are either obtrusive, requiring changes in model training, or suffer from low output quality. In this paper, we present a novel method, NeuroMask, for generating an interpretable explanation of classification model results. When applied to image classification models, NeuroMask identifies the image parts that are most important to classifier results by applying a mask that hides/reveals different parts of the image, before feeding it back into the model. The mask values are tuned by minimizing a properly designed cost function that preserves the classification result and encourages producing an interpretable mask. Experiments using state-of-the-art Convolutional Neural Networks for image recognition on different datasets (CIFAR-10 and ImageNet) show that NeuroMask successfully localizes the parts of the input image which are most relevant to the DNN decision. By showing a visual quality comparison between NeuroMask explanations and those of other methods, we find NeuroMask to be both accurate and interpretable.
Extrinisic Calibration of a Camera-Arm System Through Rotation Identification
Dec 19, 2018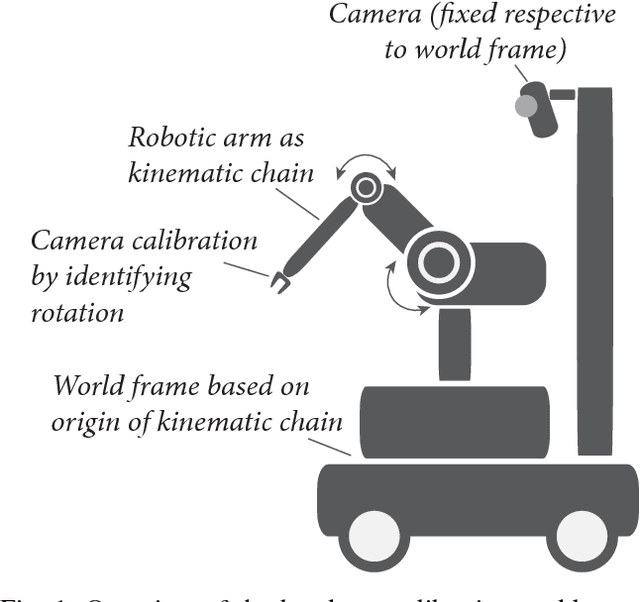

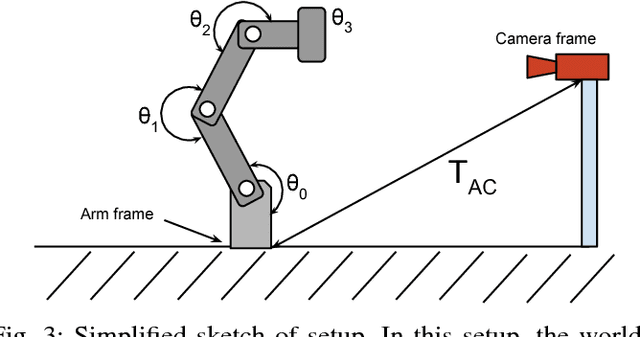
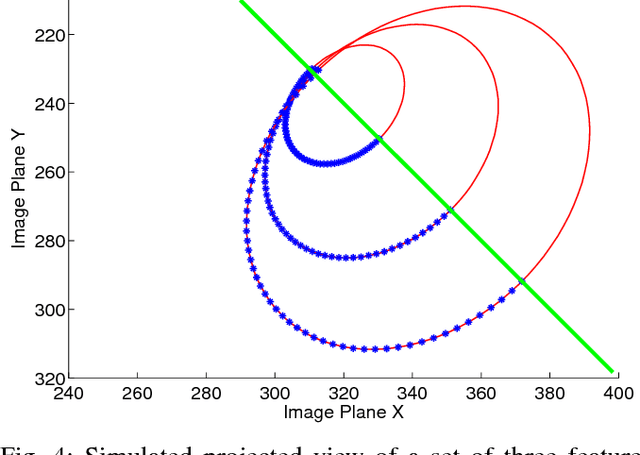
Determining extrinsic calibration parameters is a necessity in any robotic system composed of actuators and cameras. Once a system is outside the lab environment, parameters must be determined without relying on outside artifacts such as calibration targets. We propose a method that relies on structured motion of an observed arm to recover extrinsic calibration parameters. Our method combines known arm kinematics with observations of conics in the image plane to calculate maximum-likelihood estimates for calibration extrinsics. This method is validated in simulation and tested against a real-world model, yielding results consistent with ruler-based estimates. Our method shows promise for estimating the pose of a camera relative to an articulated arm's end effector without requiring tedious measurements or external artifacts. Index Terms: robotics, hand-eye problem, self-calibration, structure from motion