 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKalman Filter Tuning with Bayesian Optimization
Paper and Code
Dec 17, 2019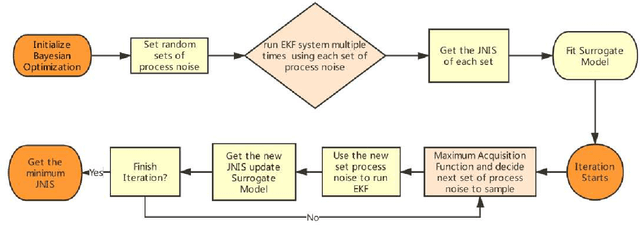
Many state estimation algorithms must be tuned given the state space process and observation models, the process and observation noise parameters must be chosen. Conventional tuning approaches rely on heuristic hand-tuning or gradient-based optimization techniques to minimize a performance cost function. However, the relationship between tuned noise values and estimator performance is highly nonlinear and stochastic. Therefore, the tuning solutions can easily get trapped in local minima, which can lead to poor choices of noise parameters and suboptimal estimator performance. This paper describes how Bayesian Optimization (BO) can overcome these issues. BO poses optimization as a Bayesian search problem for a stochastic ``black box'' cost function, where the goal is to search the solution space to maximize the probability of improving the current best solution. As such, BO offers a principled approach to optimization-based estimator tuning in the presence of local minima and performance stochasticity. While extended Kalman filters (EKFs) are the main focus of this work, BO can be similarly used to tune other related state space filters. The method presented here uses performance metrics derived from normalized innovation squared (NIS) filter residuals obtained via sensor data, which renders knowledge of ground-truth states unnecessary. The robustness, accuracy, and reliability of BO-based tuning is illustrated on practical nonlinear state estimation problems,losed-loop aero-robotic control.