 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCubeDN: Real-time Drone Detection in 3D Space from Dual mmWave Radar Cubes
Aug 25, 2025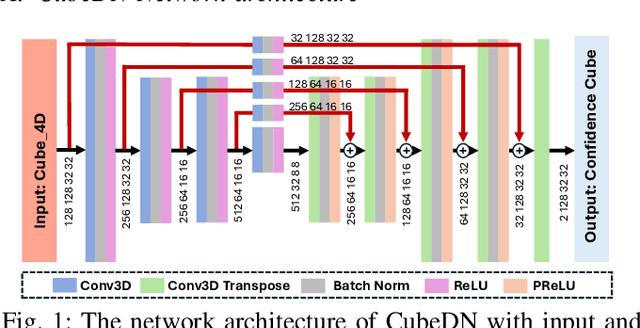
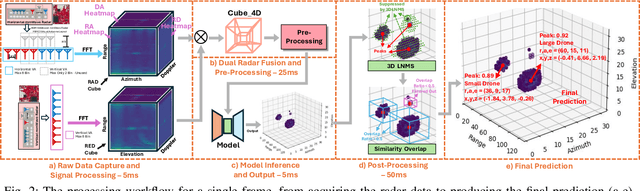
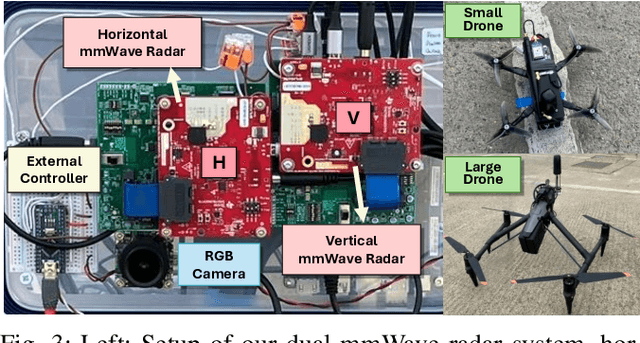
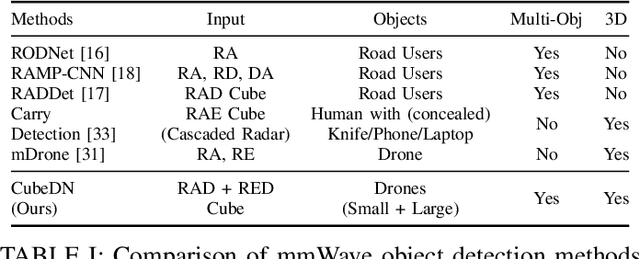
As drone use has become more widespread, there is a critical need to ensure safety and security. A key element of this is robust and accurate drone detection and localization. While cameras and other optical sensors like LiDAR are commonly used for object detection, their performance degrades under adverse lighting and environmental conditions. Therefore, this has generated interest in finding more reliable alternatives, such as millimeter-wave (mmWave) radar. Recent research on mmWave radar object detection has predominantly focused on 2D detection of road users. Although these systems demonstrate excellent performance for 2D problems, they lack the sensing capability to measure elevation, which is essential for 3D drone detection. To address this gap, we propose CubeDN, a single-stage end-to-end radar object detection network specifically designed for flying drones. CubeDN overcomes challenges such as poor elevation resolution by utilizing a dual radar configuration and a novel deep learning pipeline. It simultaneously detects, localizes, and classifies drones of two sizes, achieving decimeter-level tracking accuracy at closer ranges with overall $95\%$ average precision (AP) and $85\%$ average recall (AR). Furthermore, CubeDN completes data processing and inference at 10Hz, making it highly suitable for practical applications.
MDPose: Human Skeletal Motion Reconstruction Using WiFi Micro-Doppler Signatures
Jan 11, 2022
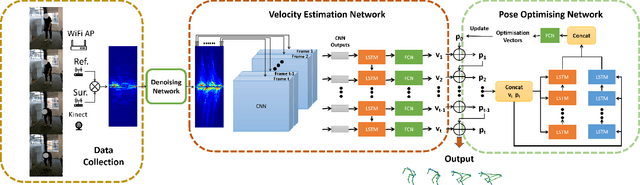
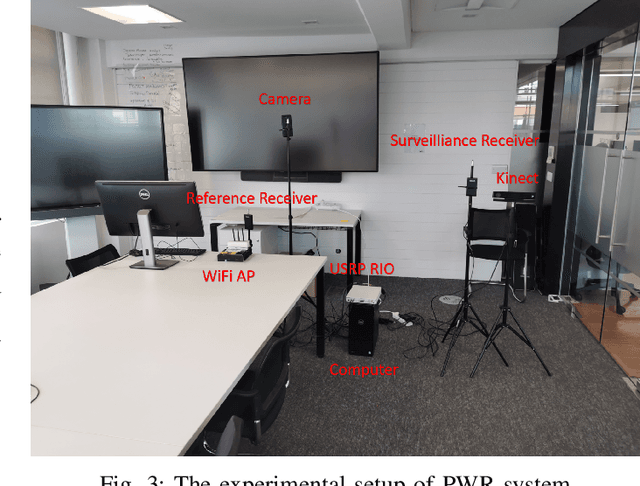
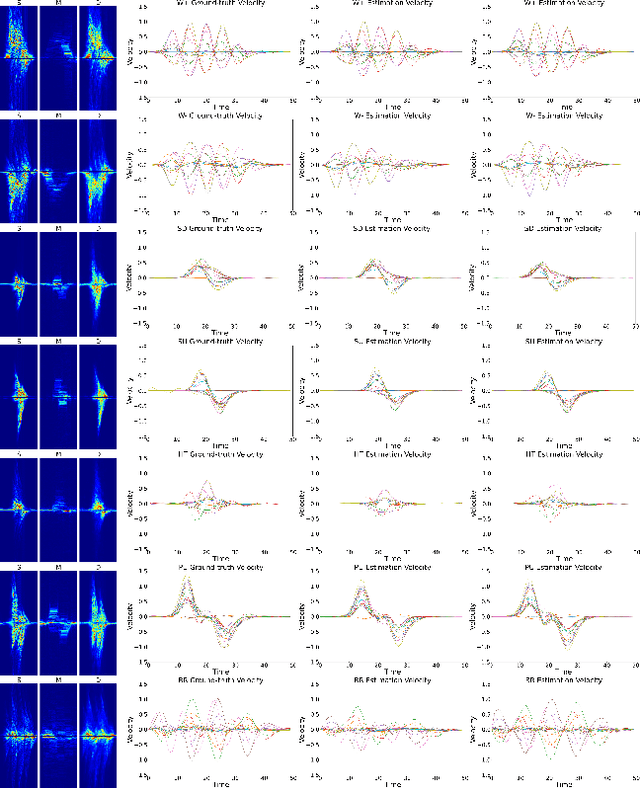
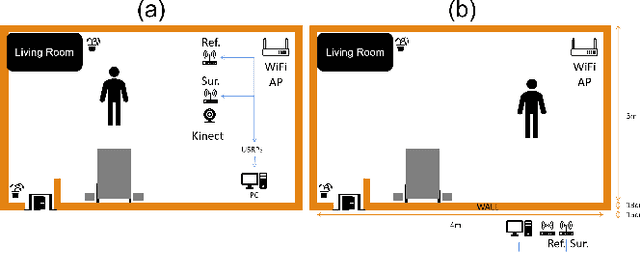
Motion tracking systems based on optical sensors typically often suffer from issues, such as poor lighting conditions, occlusion, limited coverage, and may raise privacy concerns. More recently, radio frequency (RF)-based approaches using commercial WiFi devices have emerged which offer low-cost ubiquitous sensing whilst preserving privacy. However, the output of an RF sensing system, such as Range-Doppler spectrograms, cannot represent human motion intuitively and usually requires further processing. In this study, MDPose, a novel framework for human skeletal motion reconstruction based on WiFi micro-Doppler signatures, is proposed. It provides an effective solution to track human activities by reconstructing a skeleton model with 17 key points, which can assist with the interpretation of conventional RF sensing outputs in a more understandable way. Specifically, MDPose has various incremental stages to gradually address a series of challenges: First, a denoising algorithm is implemented to remove any unwanted noise that may affect the feature extraction and enhance weak Doppler signatures. Secondly, the convolutional neural network (CNN)-recurrent neural network (RNN) architecture is applied to learn temporal-spatial dependency from clean micro-Doppler signatures and restore key points' velocity information. Finally, a pose optimising mechanism is employed to estimate the initial state of the skeleton and to limit the increase of error. We have conducted comprehensive tests in a variety of environments using numerous subjects with a single receiver radar system to demonstrate the performance of MDPose, and report 29.4mm mean absolute error over all key points positions, which outperforms state-of-the-art RF-based pose estimation systems.
FMNet: Latent Feature-wise Mapping Network for Cleaning up Noisy Micro-Doppler Spectrogram
Jul 09, 2021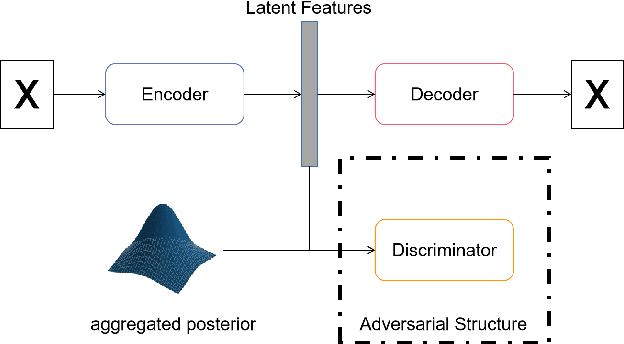
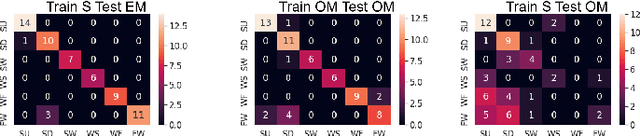
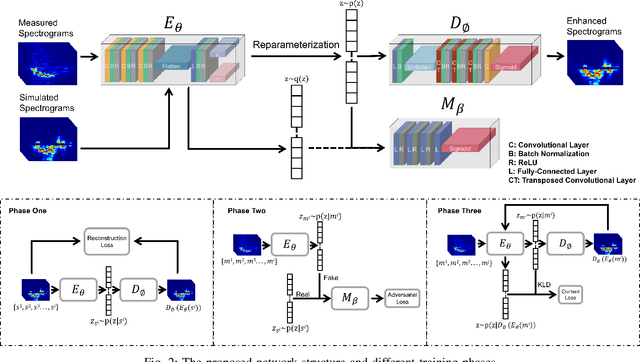
Micro-Doppler signatures contain considerable information about target dynamics. However, the radar sensing systems are easily affected by noisy surroundings, resulting in uninterpretable motion patterns on the micro-Doppler spectrogram. Meanwhile, radar returns often suffer from multipath, clutter and interference. These issues lead to difficulty in, for example motion feature extraction, activity classification using micro Doppler signatures ($\mu$-DS), etc. In this paper, we propose a latent feature-wise mapping strategy, called Feature Mapping Network (FMNet), to transform measured spectrograms so that they more closely resemble the output from a simulation under the same conditions. Based on measured spectrogram and the matched simulated data, our framework contains three parts: an Encoder which is used to extract latent representations/features, a Decoder outputs reconstructed spectrogram according to the latent features, and a Discriminator minimizes the distance of latent features of measured and simulated data. We demonstrate the FMNet with six activities data and two experimental scenarios, and final results show strong enhanced patterns and can keep actual motion information to the greatest extent. On the other hand, we also propose a novel idea which trains a classifier with only simulated data and predicts new measured samples after cleaning them up with the FMNet. From final classification results, we can see significant improvements.