 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Formulation for Path Constrained Time-Optimized Trajectory Planning with Environmental and Object Contacts
Oct 08, 2024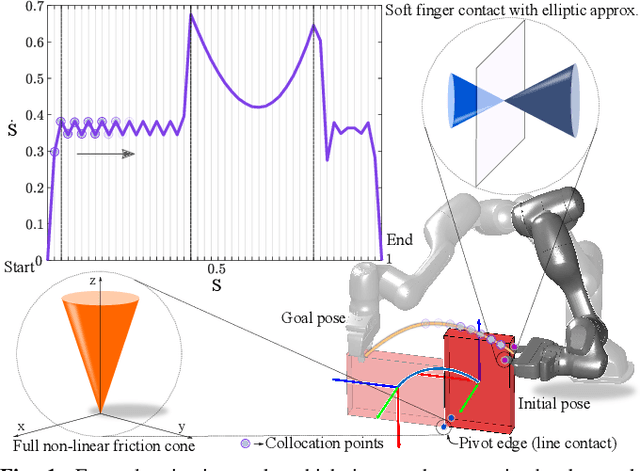
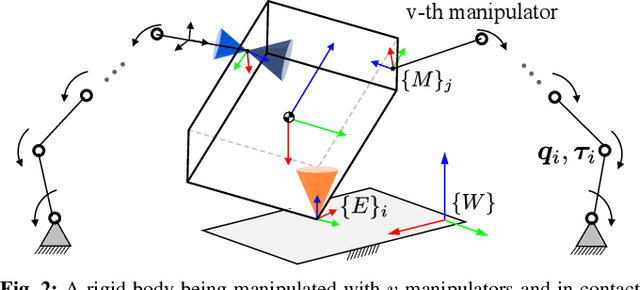
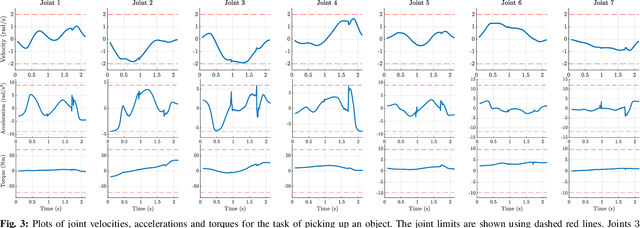

A typical manipulation task consists of a manipulator equipped with a gripper to grasp and move an object with constraints on the motion of the hand-held object, which may be due to the nature of the task itself or from object-environment contacts. In this paper, we study the problem of computing joint torques and grasping forces for time-optimal motion of an object, while ensuring that the grasp is not lost and any constraints on the motion of the object, either due to dynamics, environment contact, or no-slip requirements, are also satisfied. We present a second-order cone program (SOCP) formulation of the time-optimal trajectory planning problem that considers nonlinear friction cone constraints at the hand-object and object-environment contacts. Since SOCPs are convex optimization problems that can be solved optimally in polynomial time using interior point methods, we can solve the trajectory optimization problem efficiently. We present simulation results on three examples, including a non-prehensile manipulation task, which shows the generality and effectiveness of our approach.