Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning effects in variable autonomy human-robot systems: how much training is enough?
Paper and Code
Nov 16, 2023
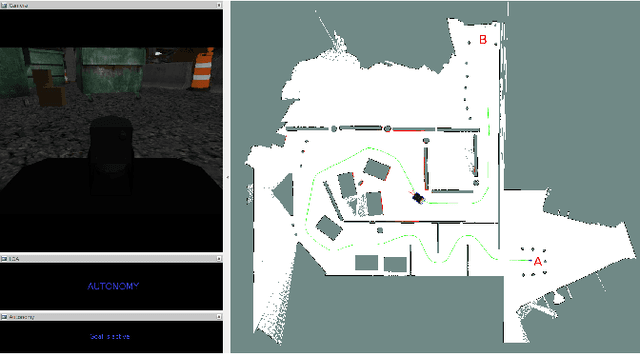

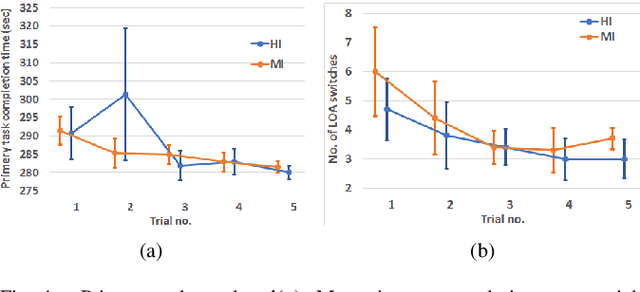
This paper investigates learning effects and human operator training practices in variable autonomy robotic systems. These factors are known to affect performance of a human-robot system and are frequently overlooked. We present the results from an experiment inspired by a search and rescue scenario in which operators remotely controlled a mobile robot with either Human-Initiative (HI) or Mixed-Initiative (MI) control. Evidence suggests learning in terms of primary navigation task and secondary (distractor) task performance. Further evidence is provided that MI and HI performance in a pure navigation task is equal. Lastly, guidelines are proposed for experimental design and operator training practices.
* 2019 IEEE International Conference on Systems, Man and Cybernetics
(SMC),pp. 720-727 * This paper is a preprint of the paper published on the IEEE
International Conference on Systems, Man and Cybernetics (SMC) 2019
View paper on